[MC land detector] In the hold mode, the firmware 1.9.2 and 1.10 will have a throttle equal to 0(MC) #13229
Comments
|
Thanks for the issue. Can you please attache a link to the logfile? Or please share the "Velocity" plot. |
|
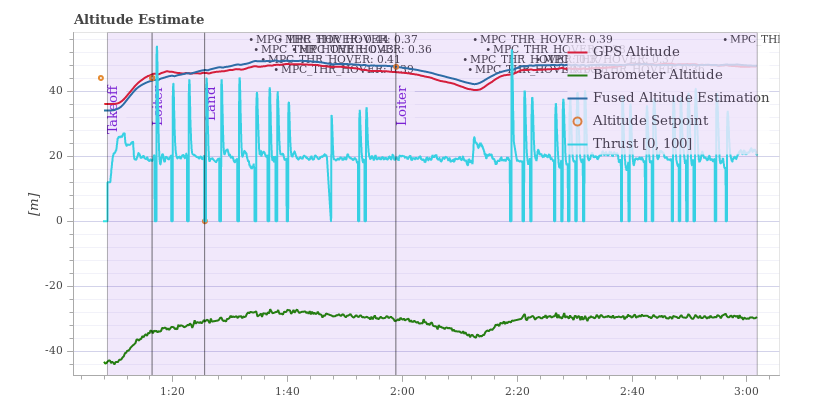
@tonight123 It looks from the pictures (a link to the log would give more insights) that your vehicle is well powered and can hover with ~26% thrust. Could you try adjusting the parameter Explanation: The vehicle is by default assuming you need ~50% throttle to hover. If you give a lot less thrust but it's not falling it assumes you have contact with the ground and cuts the thrust to land but if you're in air it detects to be suddenly falling and catches again to not crash. Future solutions for that reoccurring problem:
|
|
Each electric tone is calibrated individually. Use qgc-power moule-esc calibration, calibrate pwm-min and pwm-max, adjust thr hover to 43%, solve the problem. Please close this issue. @MaEtUgR @julianoes thanks |
In the hold mode, the firmware 1.9.2 and 1.10 will have a throttle equal to 0, which changes quickly, resulting in a high degree of control. Highly controlled in firmware 1.8.2
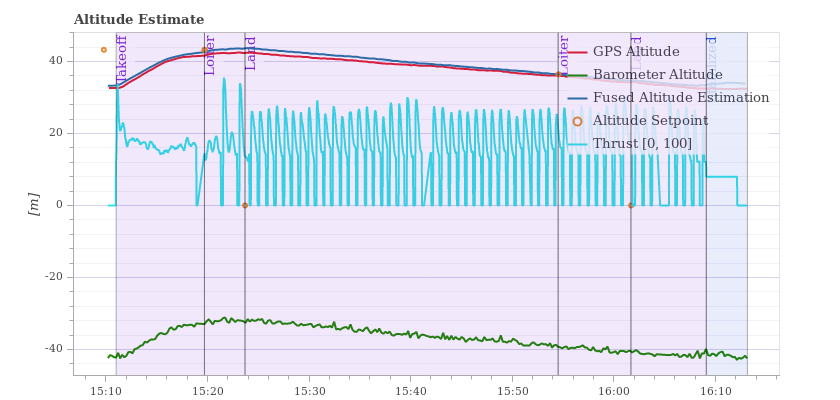
1,firmware 1.9.2
2,firmware 1.10
3,firmware 1.8.2
The text was updated successfully, but these errors were encountered: