If you use this code, please cite our paper:
@inproceedings{kluger2020consac,
title={CONSAC: Robust Multi-Model Fitting by Conditional Sample Consensus},
author={Kluger, Florian and Brachmann, Eric and Ackermann, Hanno and Rother, Carsten and Yang, Michael Ying and Rosenhahn, Bodo},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year={2020}
}
Related repositories:
Get the code:
git clone --recurse-submodules https://github.com/fkluger/consac.git
cd consac
git submodule update --init --recursive
Set up the Python environment using Anaconda:
conda env create -f environment.yml
source activate consac
Build the LSD line segment detector module(s):
cd datasets/nyu_vp/lsd
python setup.py build_ext --inplace
cd ../../yud_plus/lsd
python setup.py build_ext --inplace
For the demo, OpenCV is required as well:
pip install opencv-contrib-python==3.4.0.12
The vanishing point labels and pre-extracted line segments for the NYU dataset are fetched automatically via the nyu_vp submodule. In order to use the original RGB images as well, you need to obtain the original dataset MAT-file and convert it to a version 7 MAT-file in MATLAB so that we can load it via scipy:
load('nyu_depth_v2_labeled.mat')
save('nyu_depth_v2_labeled.v7.mat','-v7')
Pre-extracted line segments and VP labels are fetched automatically via the yud_plus submodule. RGB images and camera
calibration parameters, however, are not included. Download the original York Urban Dataset from the
Elder Laboratory's website and
store it under the datasets/yud_plus/data subfolder.
The AdelaideRMF dataset can be obtained from Hoi Sim Wong's website.
For now, we provide a mirror here.
We use the same pre-computed SIFT features of structure-from-motion datasets for self-supervised training on homography estimation which were also used for NG-RANSAC. You can obtain them via:
cd datasets
wget -O traindata.tar.gz https://heidata.uni-heidelberg.de/api/access/datafile/:persistentId?persistentId=doi:10.11588/data/PCGYET/QZTF7P
tar -xzvf traindata.tar.gz
rm traindata.tar.gz
Refer to the NG-RANSAC documentation for details about the dataset.
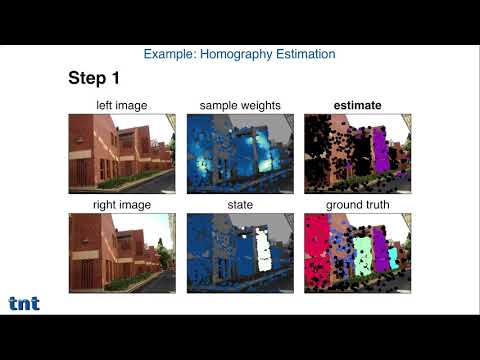
For a homography estimation demo, run:
python demo.py --problem homography --defaults
You should get a result similar to this:

For a vanishing point estimation demo, run:
python demo.py --problem vp --defaults
You should get a result similar to this:

You can also use your own images as input. Check python demo.py --help for a list of user-definable parameters.
In order to repeat the main experiments from our paper using pre-trained neural networks, you can simply run the following commands:
CONSAC on NYU-VP:
python evaluate_vp.py --dataset NYU --dataset_path ./datasets/nyu_vp/data --nyu_mat_path nyu_depth_v2_labeled.v7.mat --runcount 5
CONSAC on YUD+:
python evaluate_vp.py --dataset YUD+ --dataset_path ./datasets/yud_plus/data --runcount 5
CONSAC on YUD:
python evaluate_vp.py --dataset YUD --dataset_path ./datasets/yud_plus/data --runcount 5
For Sequential RANSAC instead of CONSAC, just add the --uniform option.
For CONSAC-S (trained in a self-supervised manner), add --ckpt models/consac-s_vp.net.
For CONSAC-S without IMR, add --ckpt models/consac-s_no-imr_vp.net.
For unconditional CONSAC, add --ckpt models/consac_unconditional_vp.net --unconditional.
CONSAC-S on AdelaideRMF:
python evaluate_homography.py --dataset_path PATH_TO_AdelaideRMF --runcount 5
For Sequential RANSAC instead of CONSAC, just add the --uniform option.
For CONSAC-S without IMR, add --ckpt models/consac-s_no-imr_homography.net.
For unconditional CONSAC-S, add --ckpt models/consac-s_unconditional_homography.net --unconditional.
Train CONSAC for vanishing point detection on NYU-VP:
python train_vp.py --calr --gpu GPU_ID
Train CONSAC-S for homography estimation on the SfM data:
python train_homography.py --calr --fair_sampling --gpu GPU_ID
The vanishing point example image shows a landmark in Hannover, Germany:
The Python implementation of the LSD line segment detector was originally taken from here: github.com/xanxys/lsd-python