Схема условно делится на несколько частей:
- Блок питания
- Основная схема
- Блок управления

Схему можно собирать несколькими разными способами:
-
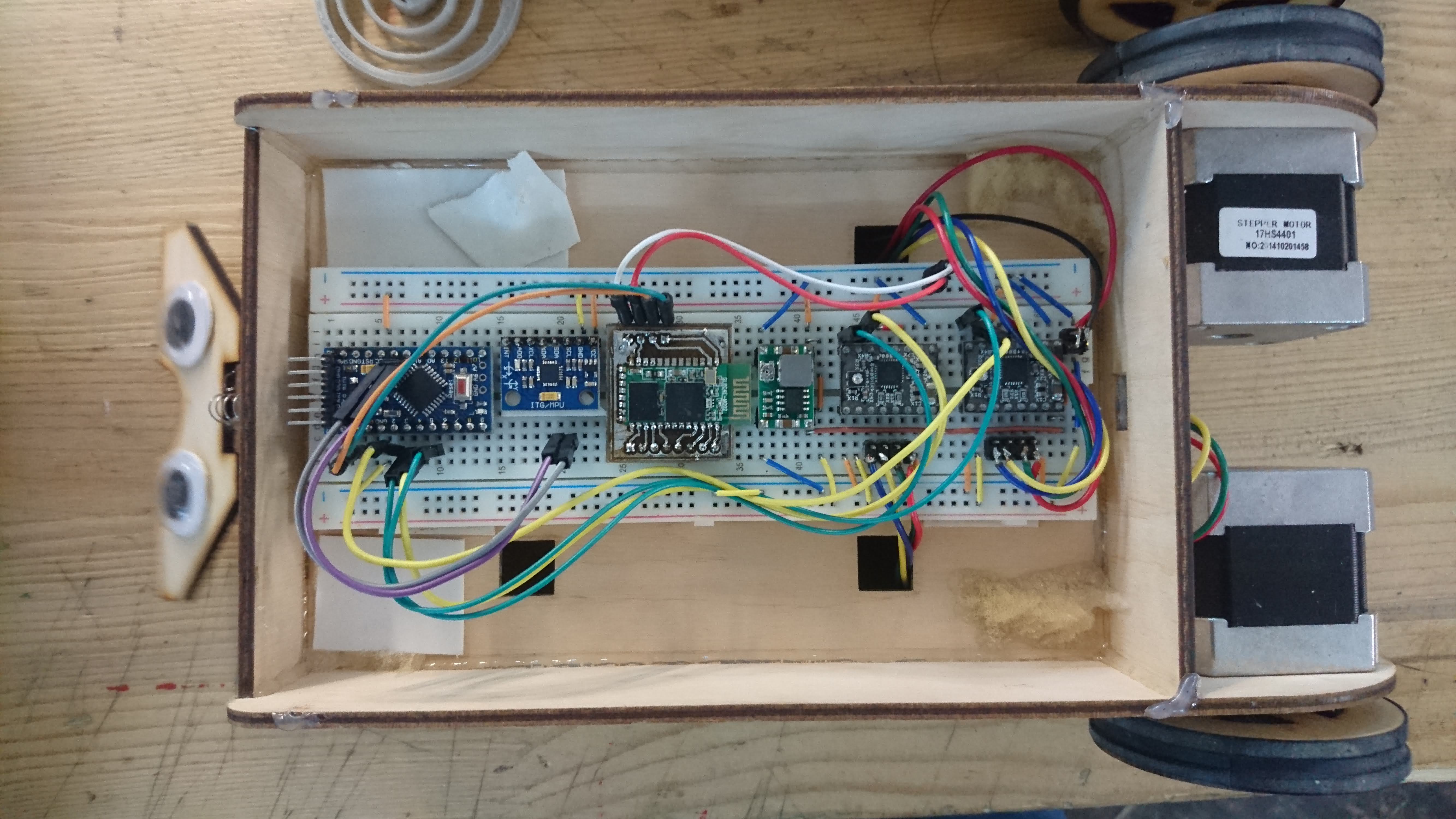
Собрать на бесконтактной макетке
-
Спаять на печатной макетной плате
- Спаять модули проводами с некоторыми раззъемными соединениями
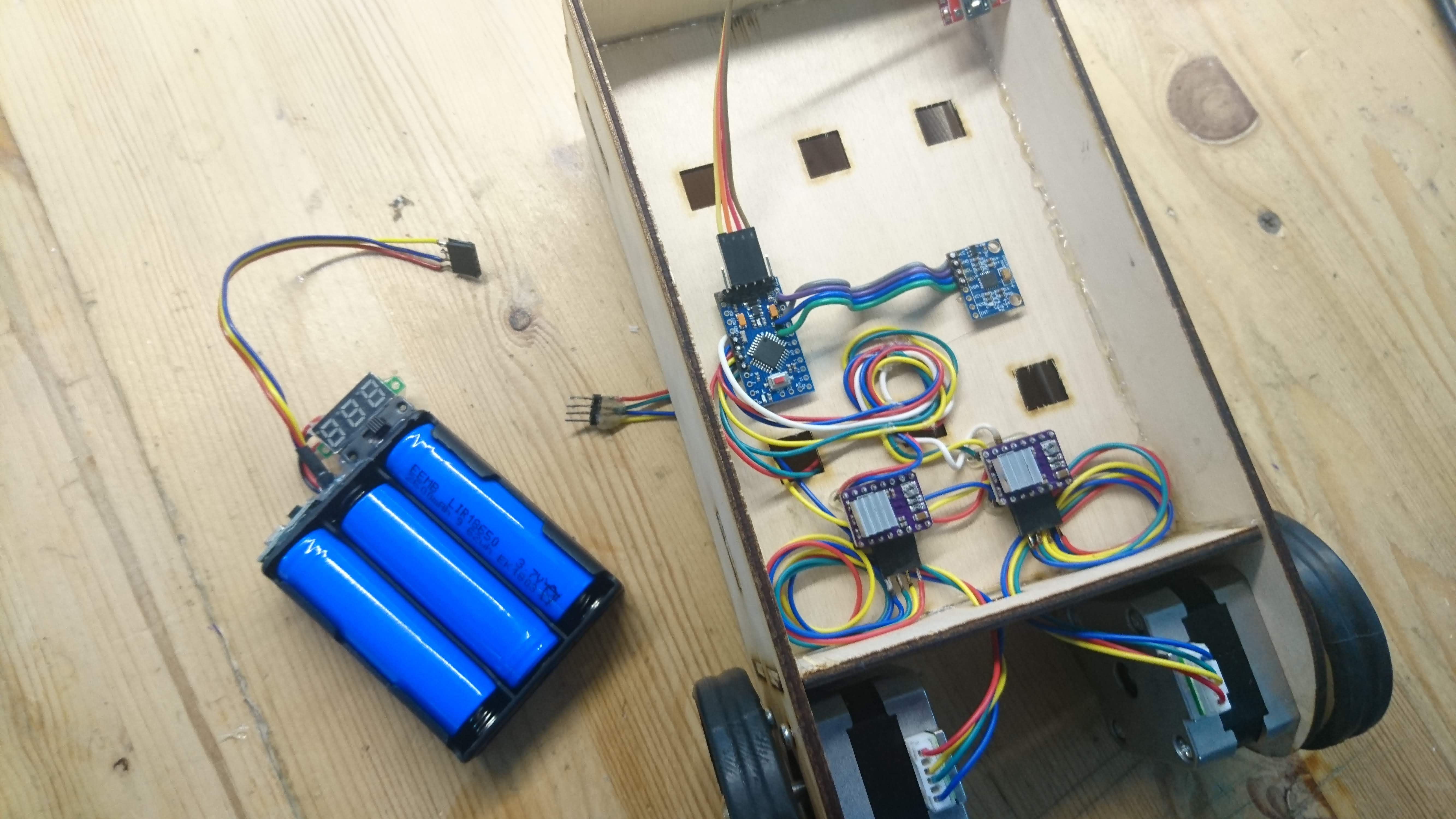
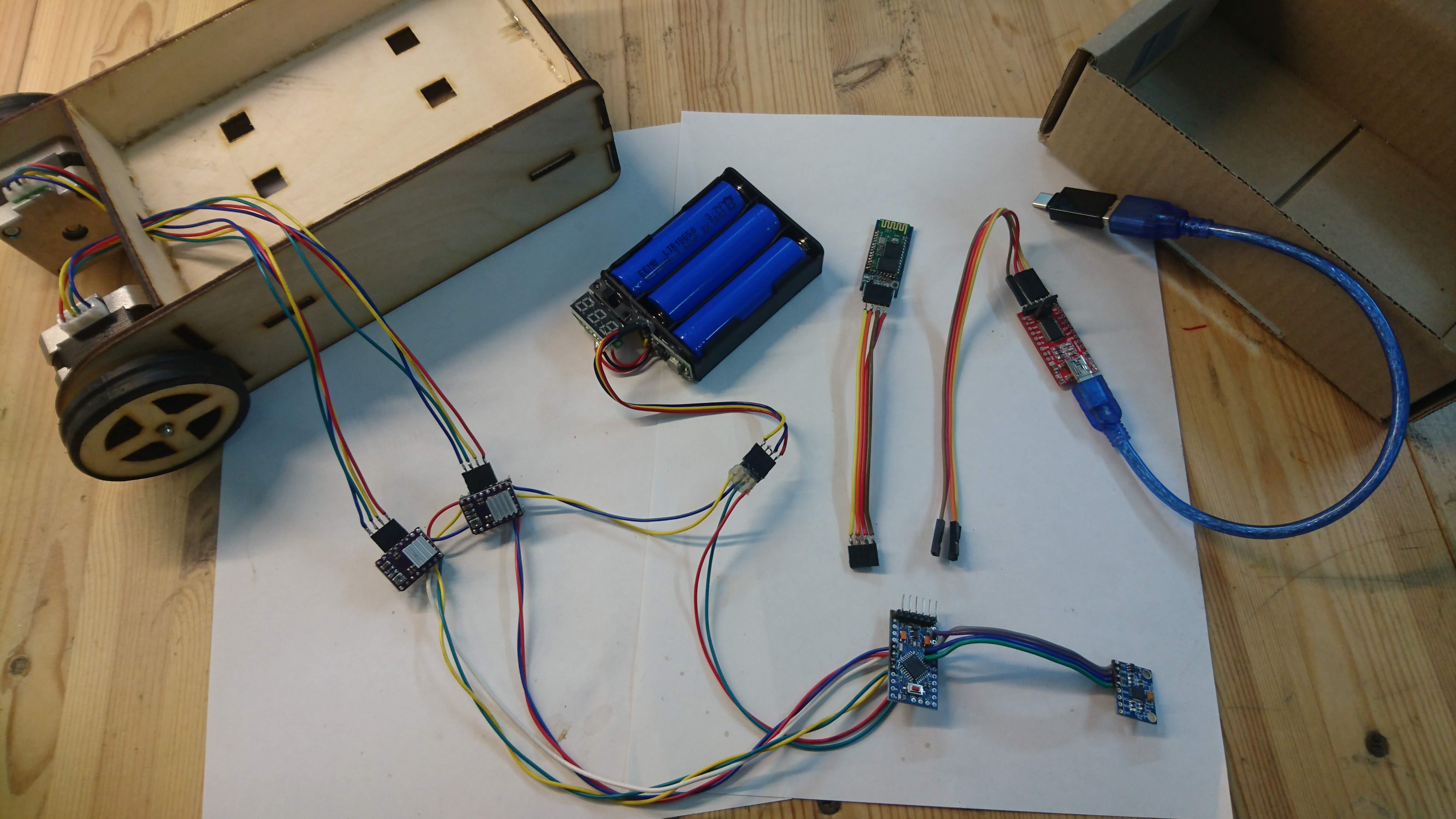
Сборка последним способом показанв на картинках ниже.
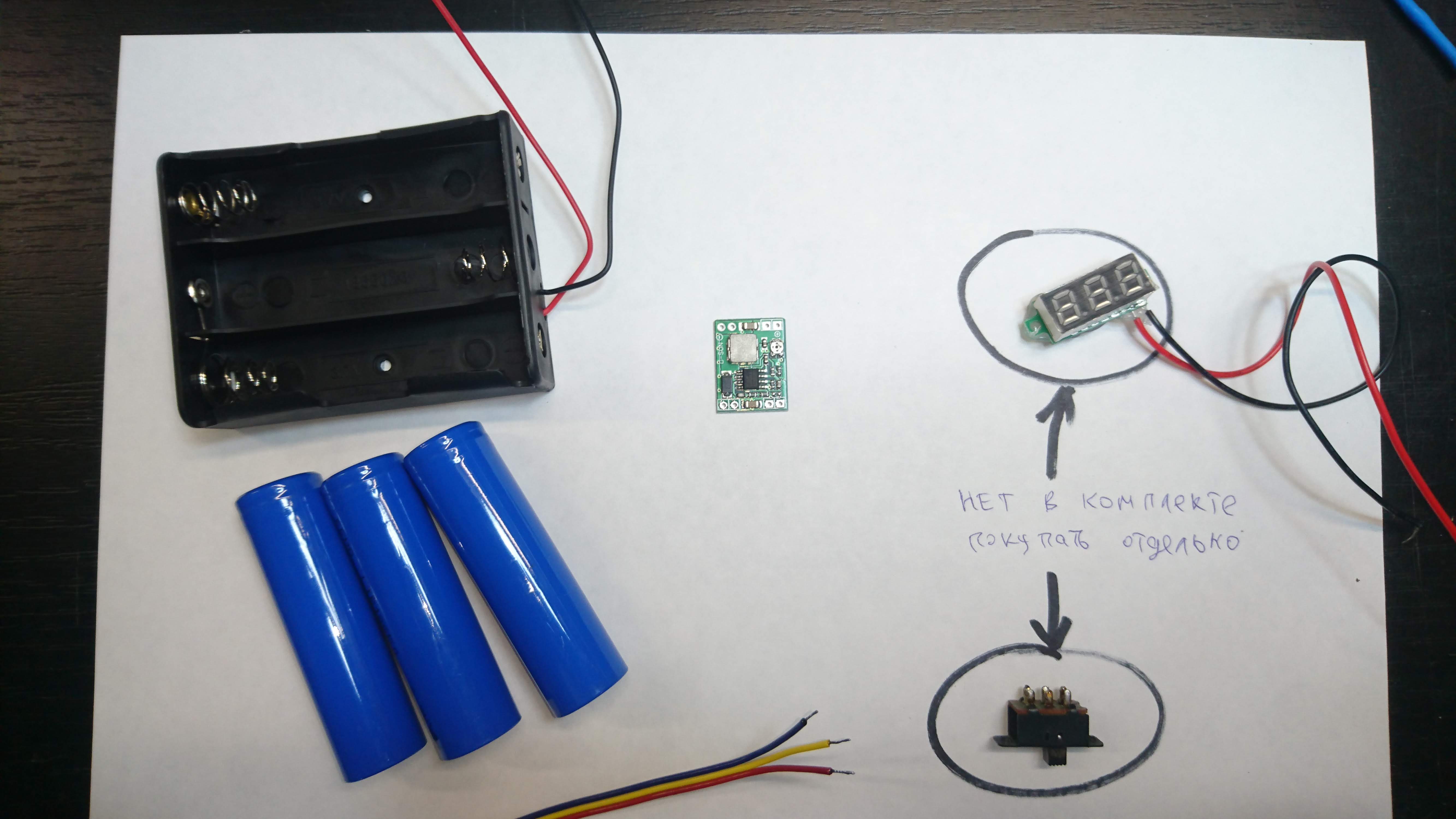
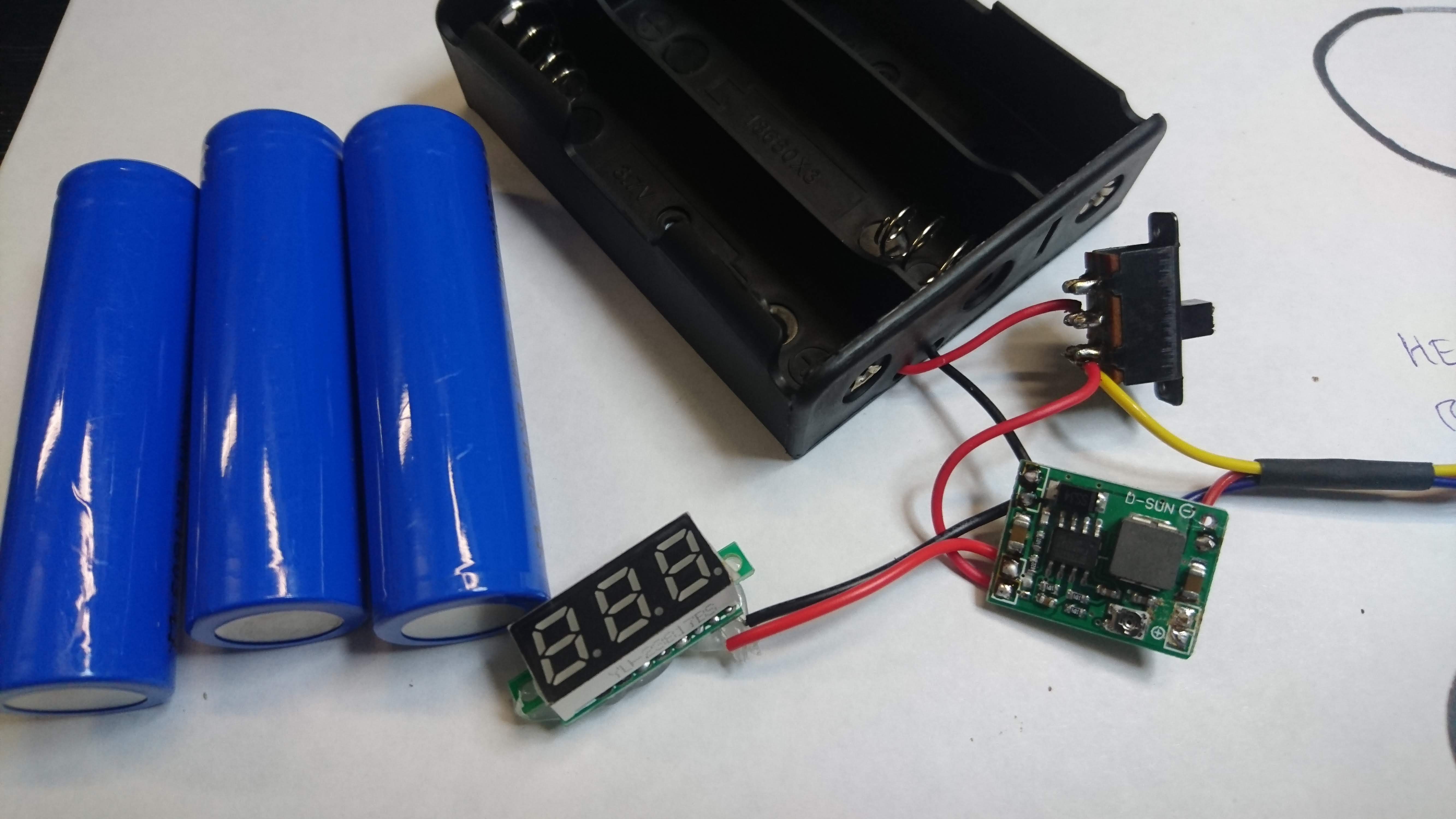
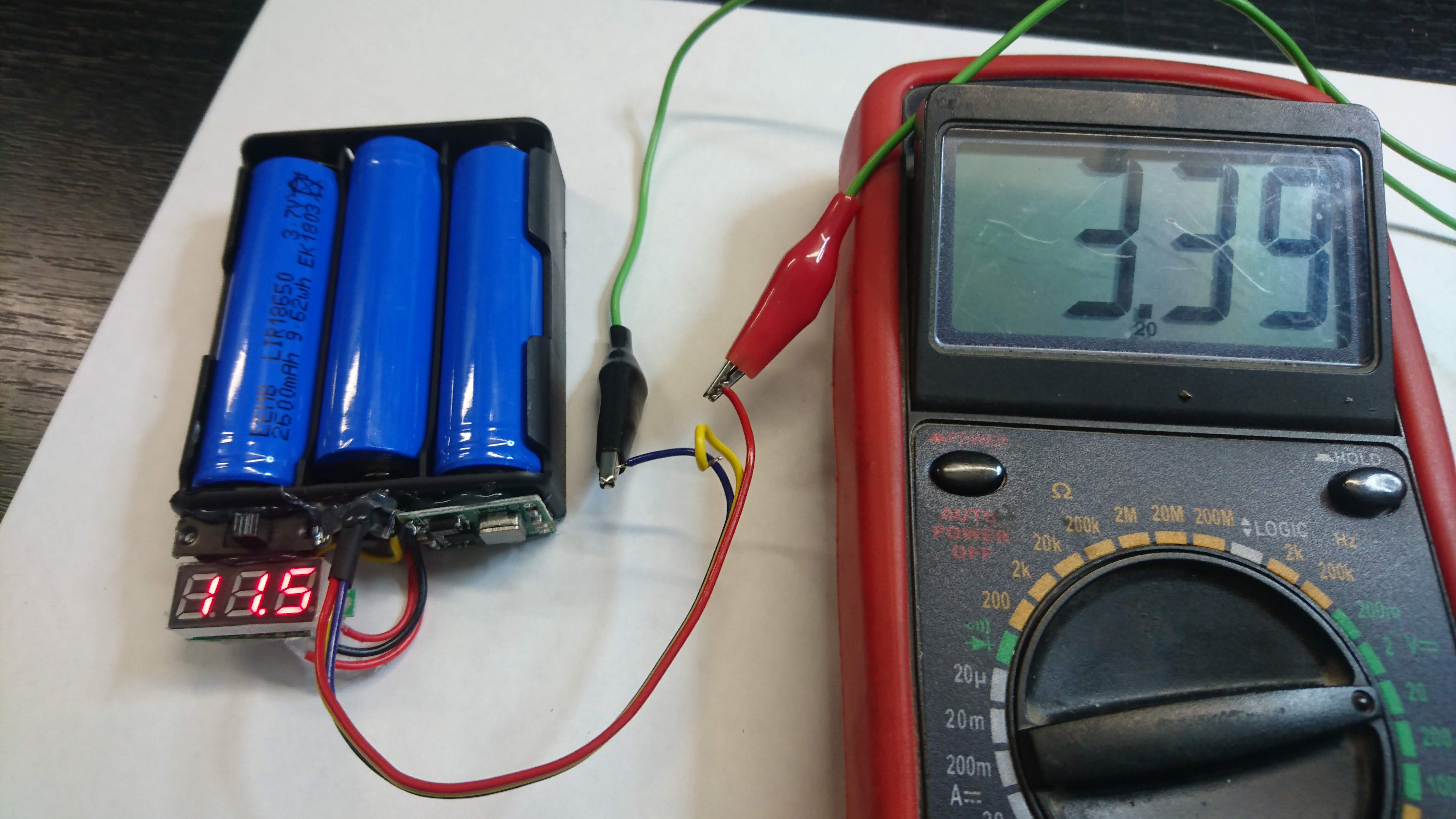
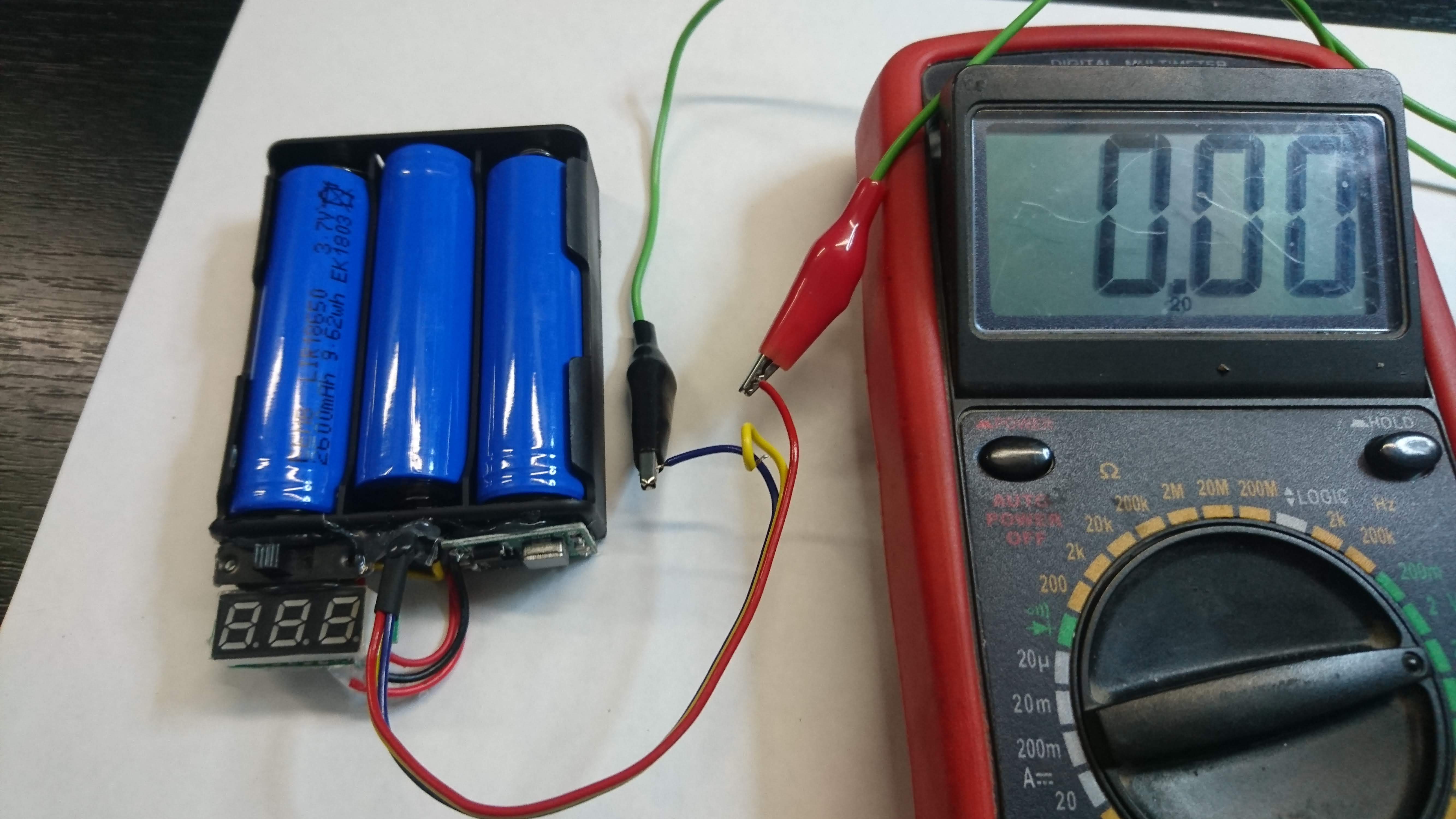
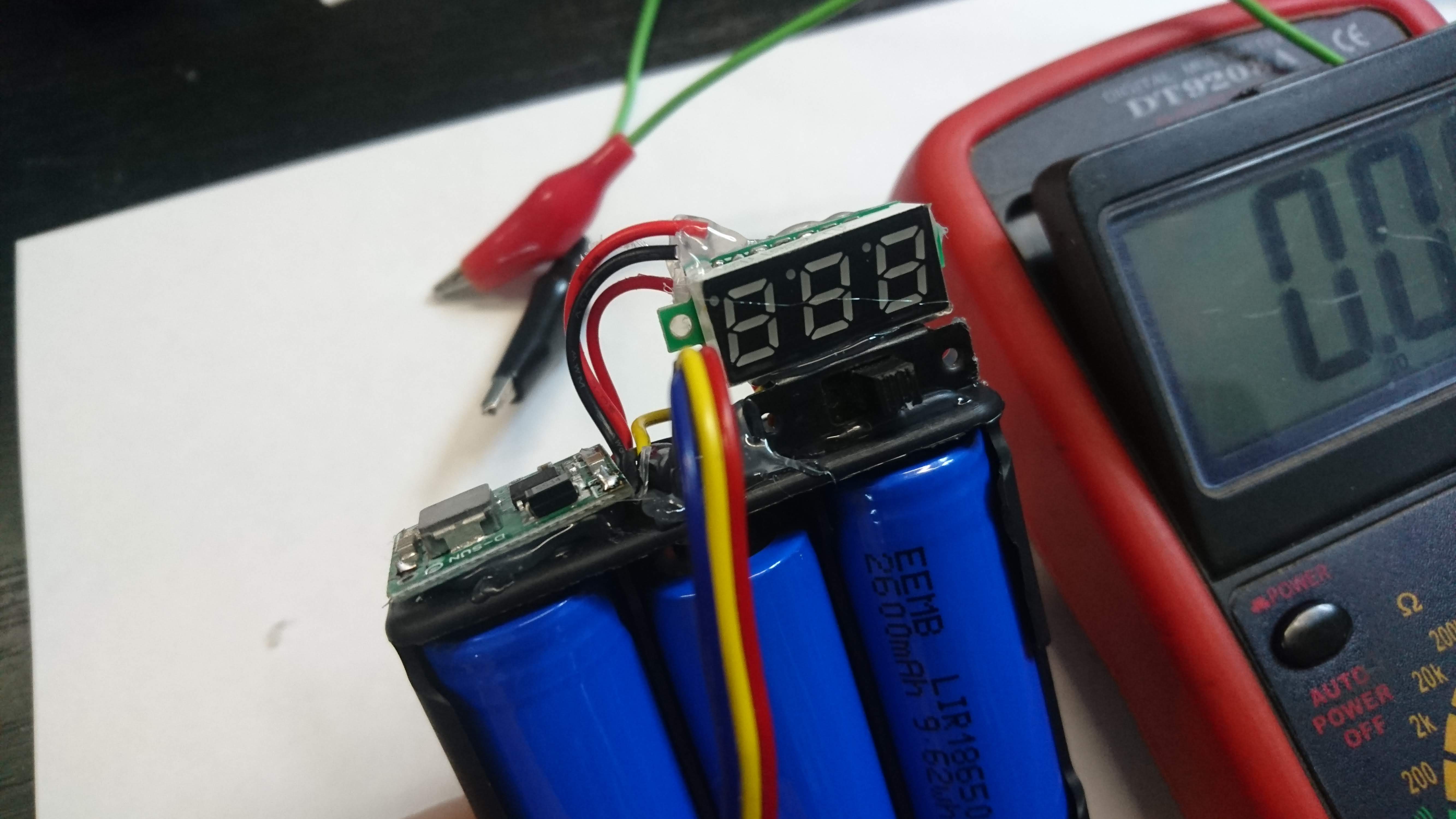
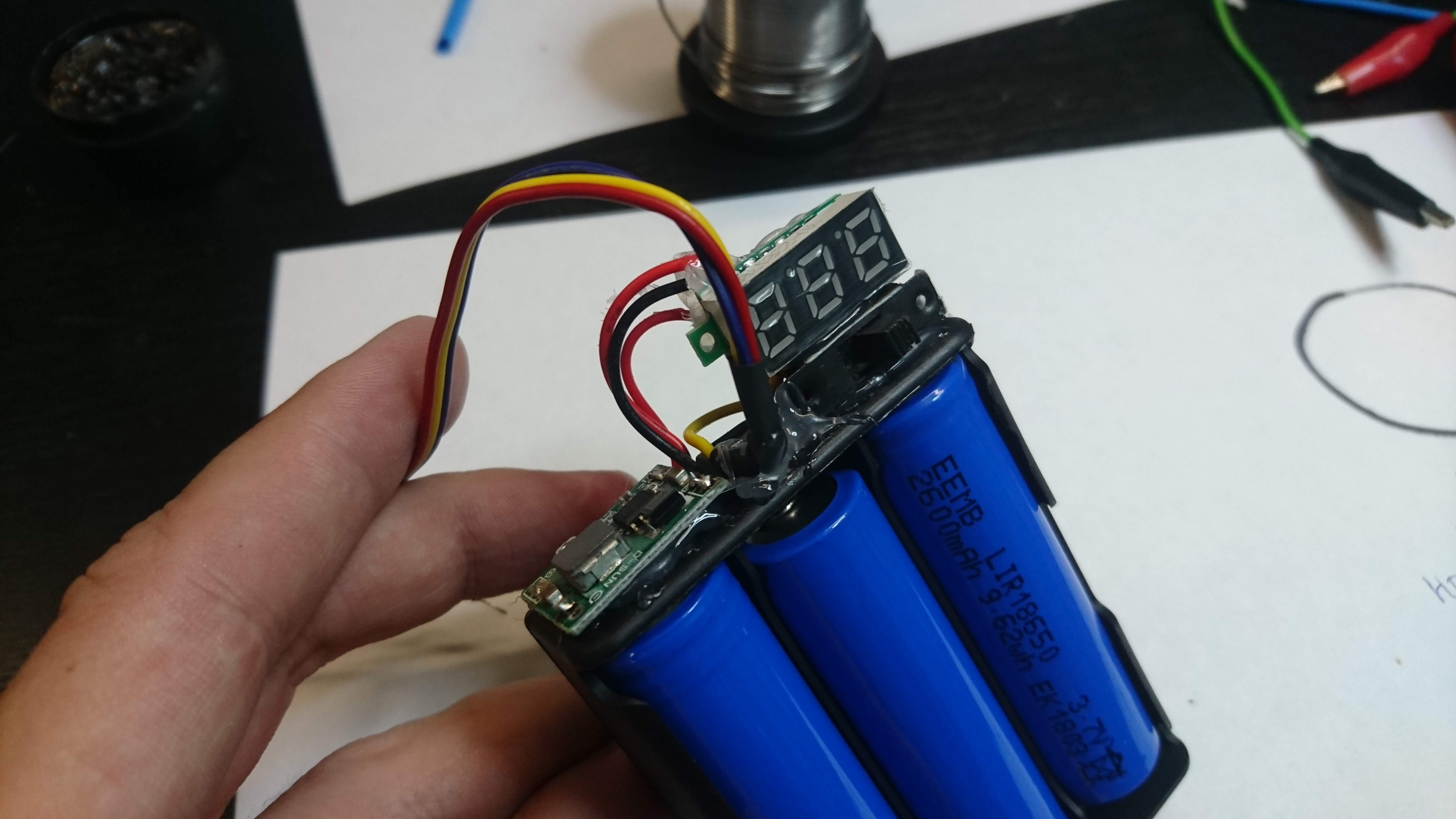
Блок питания это отсек с аккумуляторами и DC-DC преобразователь. Опционально можно добавить выключатель и модуль вольтметра чтобы видеть когда пора заряжать аккумуляторы. После спайки обязательно отрегулировать DC-DC модуль на стабилизированные +3.3В. Так же сам DC-DC и дополнительные кнопку и вольтметр кремятся с помощью термопистолета на отсек.
В результате сборки блока питания зз него должно выходить три(четыре) провода:
- Нестабилизированные +11.7 В для питания двигателей.
- Стабилизированные +3.3В для питания всей логики.
- Земля одна или два провода.
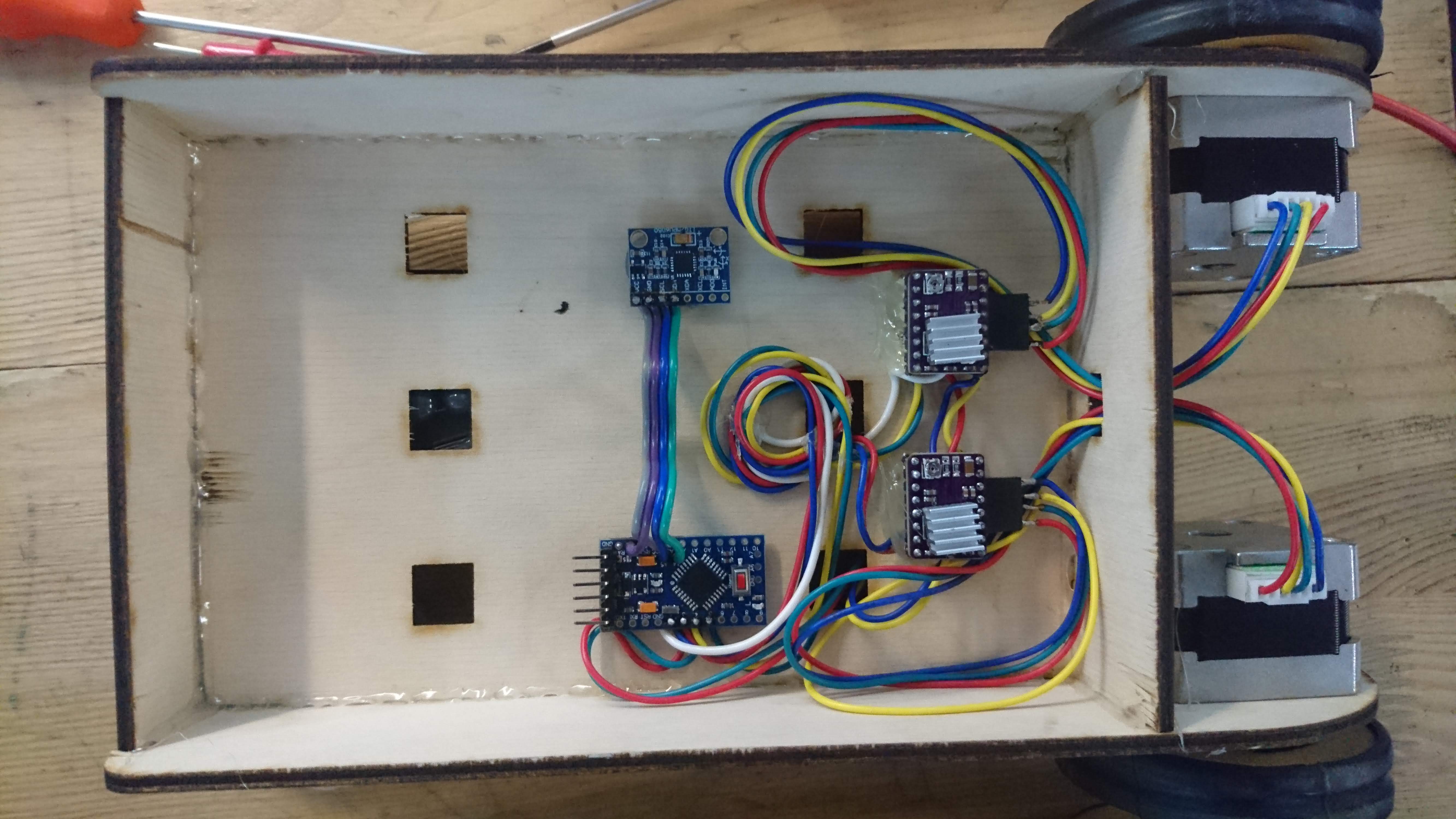
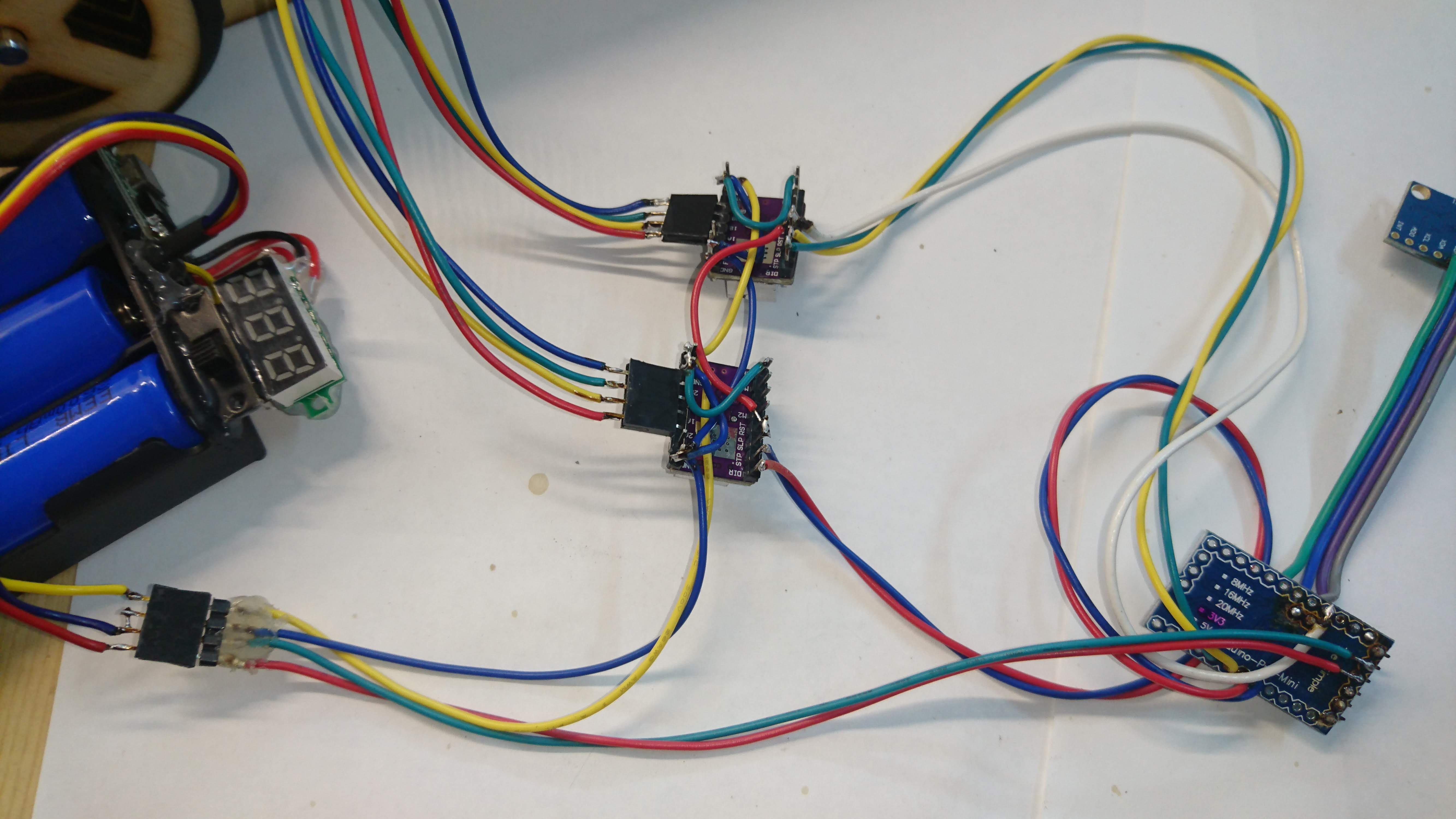
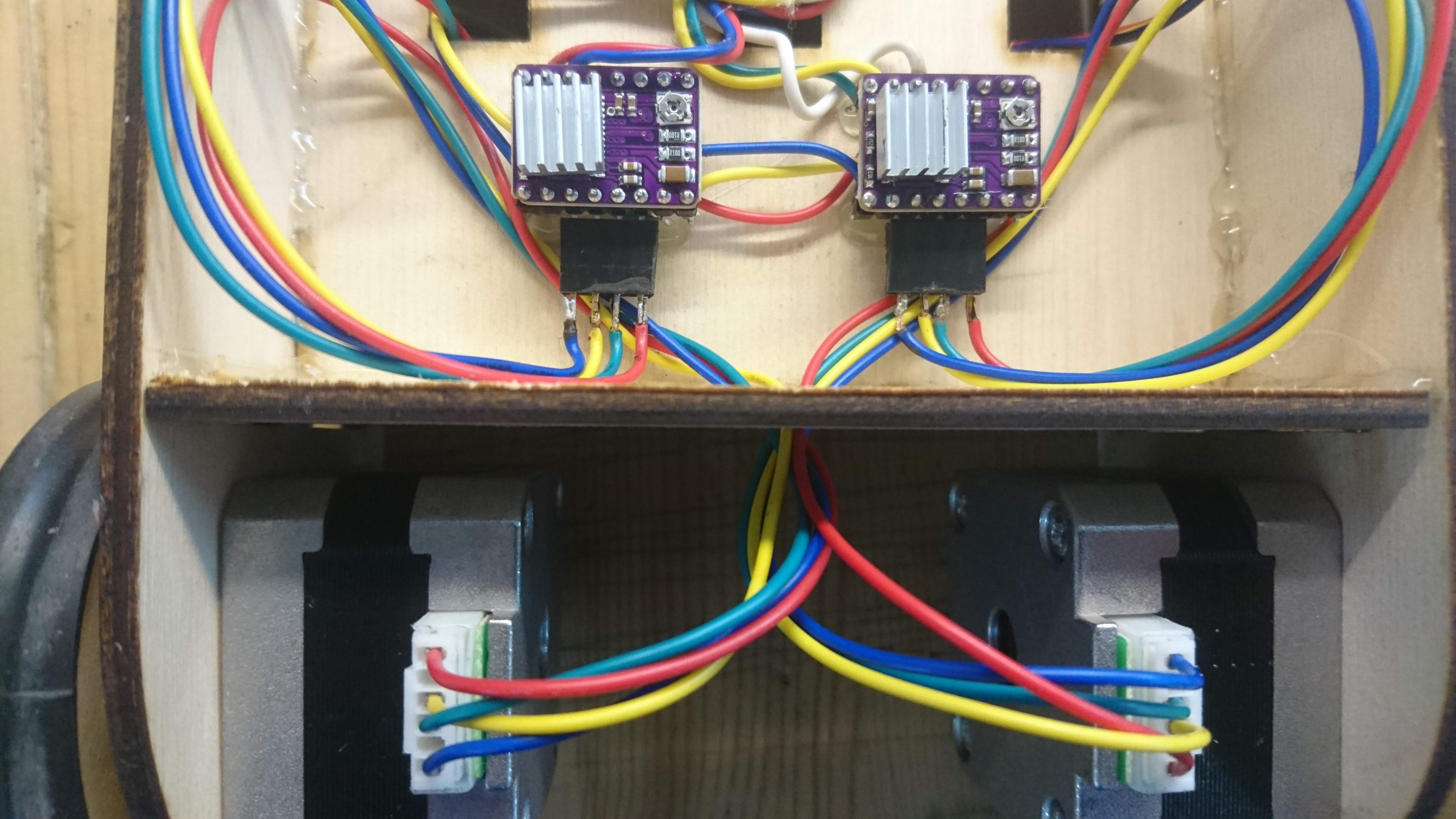
Основная схема это соедененные проводами Ардуина, шаговые драйвера и гироскоп. Соединяется все по схеме достаточно просто с помощью небольшого количества проводков. Для удобства немлохо иметь коннекторы к шаговым двигателям и на питание всей схемы.
Из нюансов стоит обратить внимание и правильно подсоединить к драйверам пары обмоток шагового двигателя. На фотографиях обмотки это синий+желтый и красный+зеленый.
Так же можно предусмотреть перемычки для настройки микростеппинга на драйверах. Хорошо себя показали 1/2 и 1/4 микрошага. При 1/2 можно развить большую скорость. При 1/4 движения более плавные, робот легче в настройке и меньше падает.
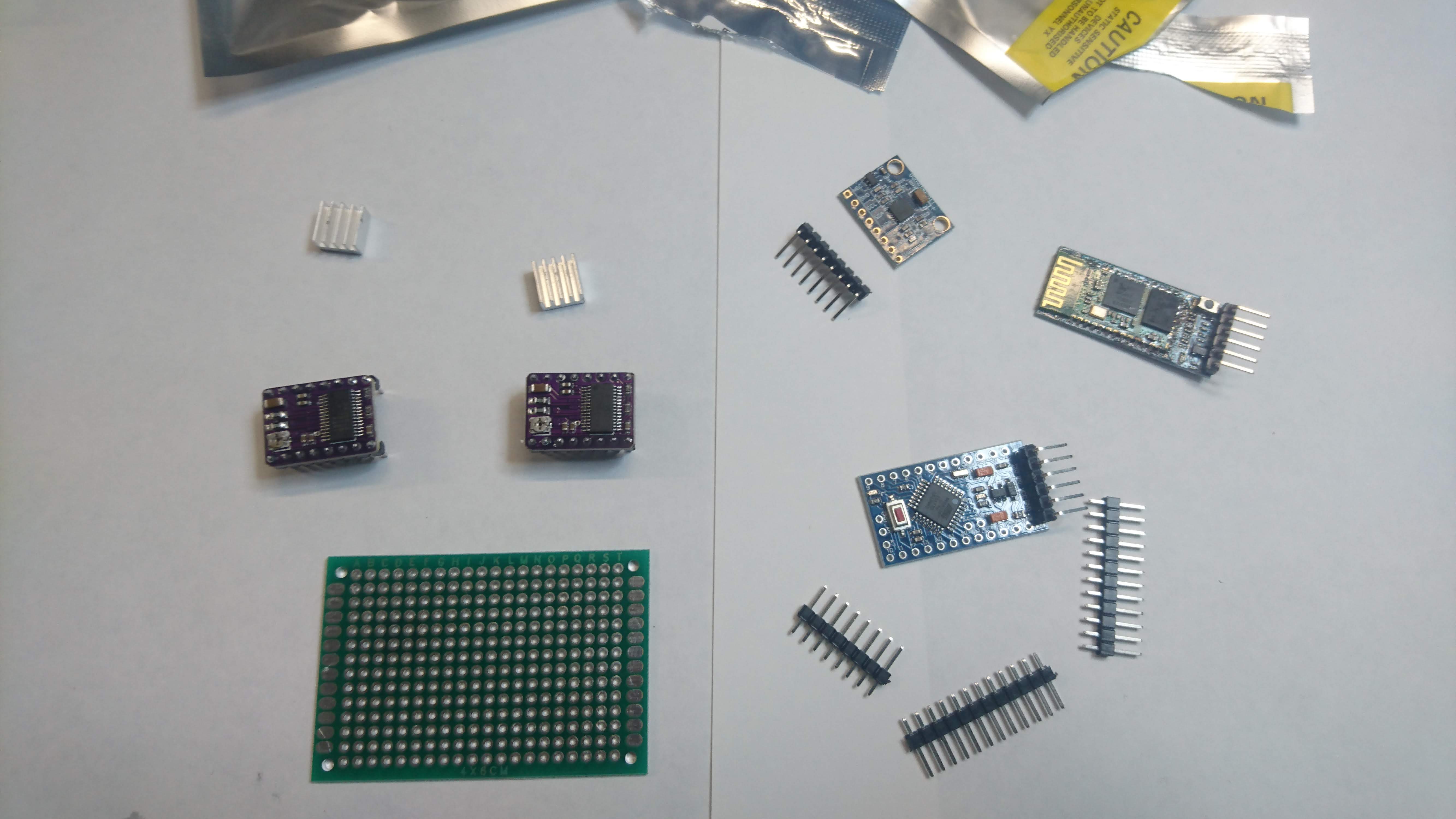
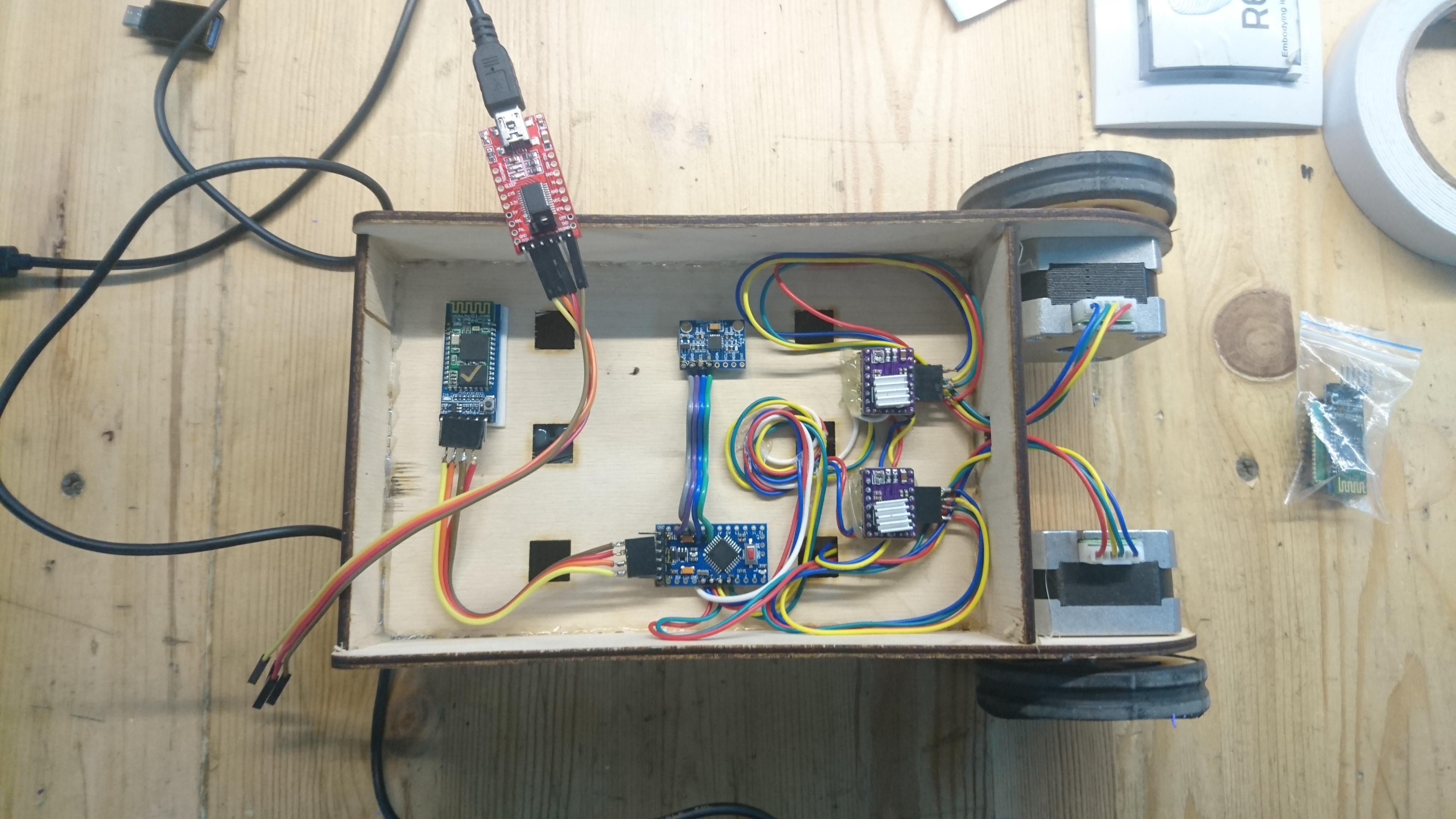
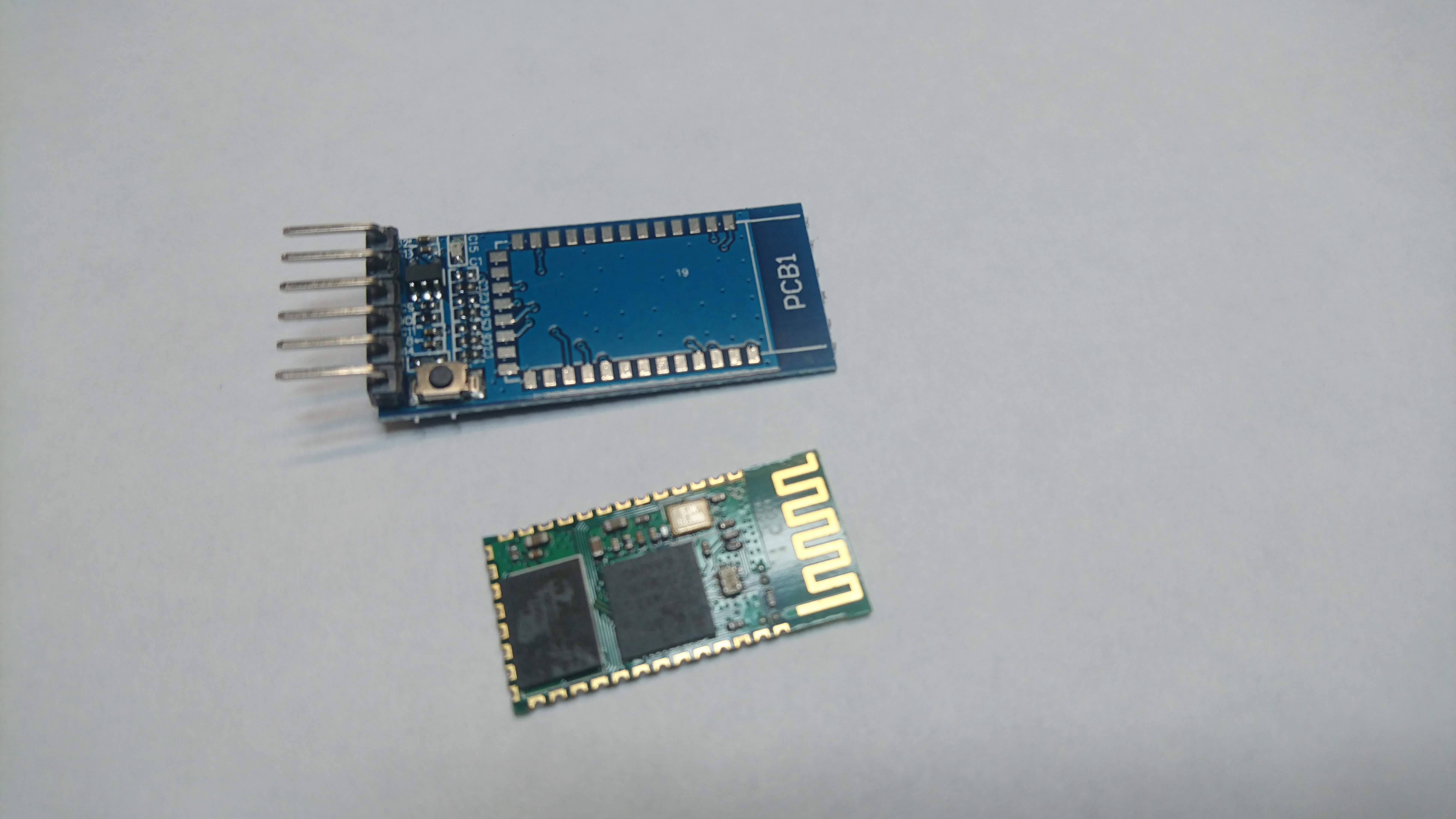
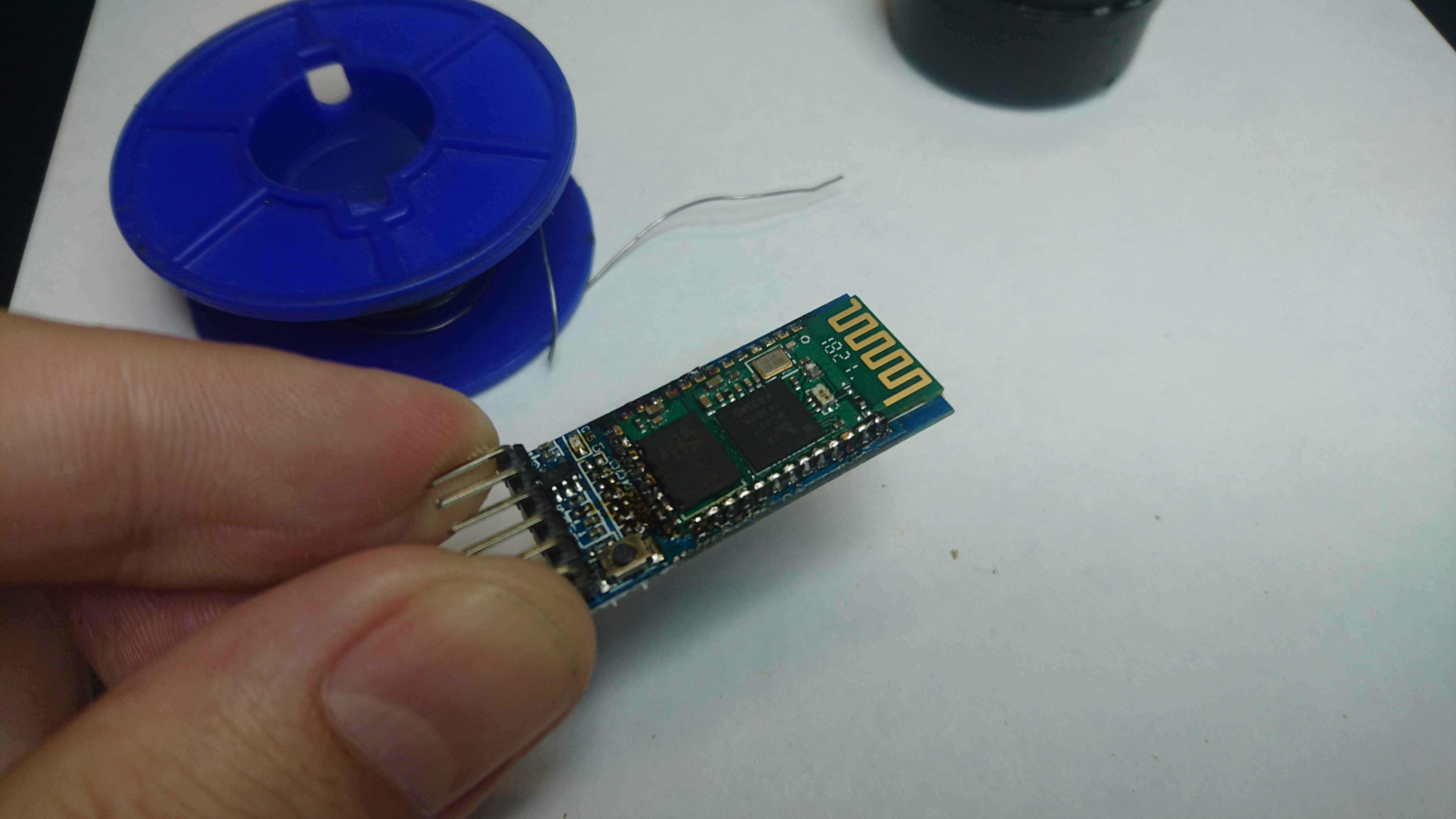
Блок управления - это модуль HC-05 распаяный на переходную платку. Так же удобно к нему иметь 4х жильный провод мама-мама чтобы подсоединять его напрямую к разъему на Arduino. Подсоединяется он туда только после того блютус модуль настроен, а сама схема откалибрована
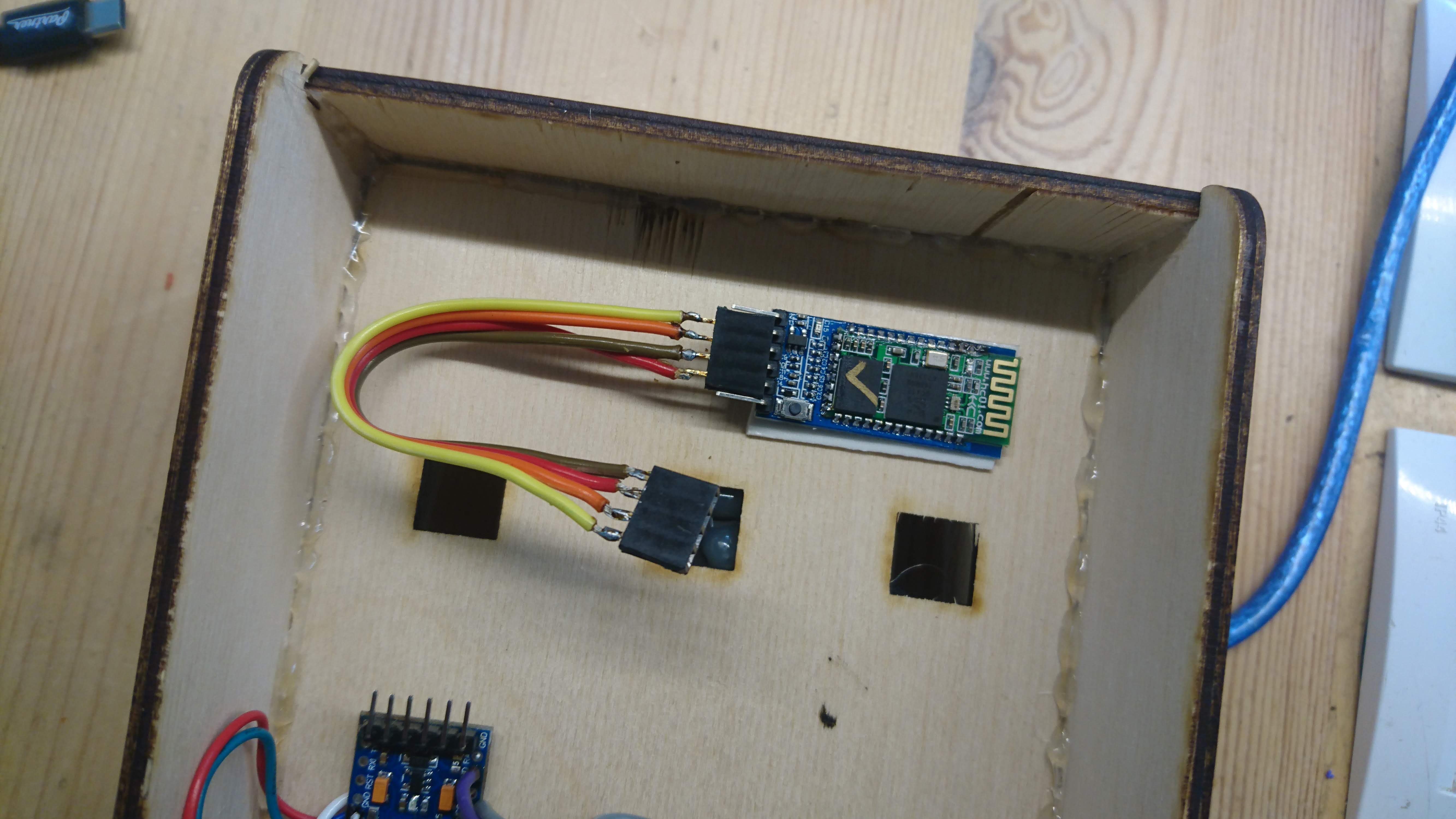
После спайки соединенные проводами модули крепится на термоклей внутрь корпуса.
ВАЖНО Разместить ось гироскопа таким образом чтобы версикальной была либо ось Y либо ось X. Маркировку осей можно увидеть на самом гироскопе.