This repository is a GPU-accelerated version FLVIS. If you want to achieve best performance on your machine, we recommend you to use it without hesitation.
The dependency is almost the same as original FLVIS. Besides, you need a cuda version OpenCV. We only test it under OpenCV 4.5.1
Set the correct path of your OpenCV in CMakeLists.txt:
find_package(OpenCV 4 REQUIRED PATHS your_path)
Turn on use_gpu in /launch/d435i/sn943222072828_depth.yaml to enable fast detector and optical flow tracking.
| Jetson Tx2 | Feature detect | LK optical flow tracking |
|---|---|---|
| CPU version | 15ms | 15ms |
| GPU support | 8ms | 11ms |
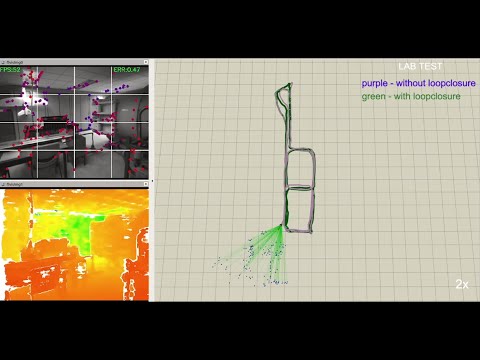
| EuRoC DataSet MH_05 | Handheld Test in Lab | FlVIS on UAV Platform |
|---|---|---|
 |
 |
 |
Under Review, a pre-print version can be found here
Intel RealSense D435i Camera
EuRoC MAV Dataset
We have tested in the following environment:
Ubuntu 16.04 + ROS Kinetic
Ubuntu 18.04 + ROS melodic
Clone the repository to the catkin work space eg. /catkin_ws/src
git clone https://github.com/HKPolyU-UAV/FLVIS.git
Install 3rd Part library
cd catkin_ws/src/FLVIS/3rdPartLib/
./install3rdPartLib.sh
Compile
cd ~/catkin_ws
catkin_make
Support Platform D435i(Depth/Stereo Mode), EuRoC Dataset, KITTI Dataset
Download the dataset Link-melab_sn943222072828.bag to /bag folder
Decompress the rosbag:
rosbag decompress melab_sn943222072828.bag
run the following launch files:
roslaunch flvis rviz_bag.launch
roslaunch flvis flvis_bag.launch
Install the realsense driver and its ros wrapper
Boot the d435i camera and echo the camera infomation
roslaunch flvis d435i_depth.launch
rostopic echo /camera/infra1/camera_info
You will get the camera infomation like:
 As shown, where the resolution is 640x480 and fx=384.16455078125; fy=384.16455078125; cx=320.2144470214844;cy=238.94403076171875.
As shown, where the resolution is 640x480 and fx=384.16455078125; fy=384.16455078125; cx=320.2144470214844;cy=238.94403076171875.
Edit these information in the config yaml file (say: /launch/d435i/sn943222072828_depth.yaml):
image_width: 640
image_height: 480
cam0_intrinsics: [384.16455078125, 384.16455078125, 320.2144470214844, 238.94403076171875]#fx fy cx cy
cam0_distortion_coeffs: [0.0, 0.0, 0.0, 0.0]#k1 k2 r1 r2In the launch file "flvis_d435i.launch", make sure "/yamlconfigfile" is point to the edited config file
<param name="/yamlconfigfile" type="string" value="$(find flvis)/launch/d435i/sn943222072828_depth.yaml"/>
run the following launch files:
roslaunch flvis rviz_bag.launch
roslaunch flvis flvis_d435i_depth.launch
Like what we did in 5.1.2, we need to config the /launch/d435i/sn943222072828_stereo.yaml
Note that, by default the two camera share the same intrinsic parameters, and the baseline length is 0.05m:
cam0_intrinsics: [384.16455078125, 384.16455078125, 320.2144470214844, 238.94403076171875]#fx fy cx cy
cam0_distortion_coeffs: [0.0, 0.0, 0.0, 0.0]#k1 k2 r1 r2
cam1_intrinsics: [384.16455078125, 384.16455078125, 320.2144470214844, 238.94403076171875]#fx fy cx cy
cam1_distortion_coeffs: [0.0, 0.0, 0.0, 0.0]#k1 k2 r1 r2
T_cam0_cam1:
[ 1.0, 0.0, 0.0, 0.05,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0]
Download the dataset(say MH_05_difficult) into the bag folder:
roscd flvis/bag/
wget http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_05_difficult/MH_05_difficult.bag
Edit the corresponding bag name in flvis_euroc_mav.launch file:
<node pkg="rosbag" type="play" name="rosbag" args="$(find flvis)/bag/MH_05_difficult.bag"/>
run the following launch files:
roslaunch flvis rviz_euroc.launch
roslaunch flvis flvis_euroc_mav.launch
Download the dataset into the bag folder:

Edit the corresponding bag name in flvis_kitti.launch file:
<param name="/publish_gt" type="bool" value="true" />
<param name="/dataset_folder_path" type="string" value="$(find flvis)/bag/KITTI/dataset/sequences/00/" />
<param name="/dataset_gt_file" type="string" value="$(find flvis)/bag/KITTI/dataset/poses/00.txt" />
run the following launch files:
roslaunch flvis rviz_kitti.launch
roslaunch flvis flvis_kitti.launch
Shengyang Chen(Dept.ME,PolyU): shengyang.chen@connect.polyu.hk
Yajing Zou(Dept.LSGI,PolyU):rick.zou@connect.polyu.hk