integrate optional NPFG library for wind-aware fixed-wing guidance #18810
Conversation
There was a problem hiding this comment.
Thanks a lot for this big contribution! Started testing it in SITL, it's like day and night when the wind speed is approaching the trim airspeed, and so far I couldn't get the new logic to break down:)
I so far only have some small feedback about the changes outside of the npfg library, and are now making my way through the algorithm. Looking forward to start testflying it on real vehicles after Christmas!
Concerning code structure/ library organization: Assuming we don't find any shortcomings compared to the legacy L1 guidance, do you even see the need of keeping both options on the long run?
|
@tstastny @Jaeyoung-Lim @sfuhrer maybe we could do a quick pass to get this into a safe state to merge (disabled by default)? |
There was a problem hiding this comment.
@dagar @sfuhrer We have been flying internally with this for a while now, and given that it has no influence when it is disabled, I would say we can still merge it.
@tstastny There is a small merge conflict that we need to resolve 😄
I think we should still get ethz-asl#54 included since it handles a corner case of the waypoint logic. I am more curious how we want to have L1 and NPFG co-exist. Is the current way of having two controller libraries built in and selected with a parameter good enough?
@Jaeyoung-Lim - I made a change in e3b4e2a which should address this corner case. see before (https://review.px4.io/plot_app?log=6f9f1b13-db52-457b-83e0-304c04dff891) and after (https://review.px4.io/plot_app?log=baa005b0-be9f-4200-b527-1cd90ff4bc2c) However, @sfuhrer I'm interested in your perspective on the other changes I made in that commit. I moved this handling to the mission block, as that seems like the more appropriate place to consider waypoint switches to me. In general.. this is part of a larger wish I have of separating out the guidance vs waypoint logic vs mission management.. right now too many things are done in one class (the guidance class). A lot of these extra condition checks could be simplified if we switch to defining e.g. "line segment" path types and "point" path types. But a discussion for another day.. It would be possible to instead take this passed the waypoint case as a point tracking case (as L1 currently does), but I fear in high winds when the vehicle is flying slow, or simply when the vehicle is far from the track laterally but then passes the waypoint, the old way of dealing with this (as in L1) could lead to jumpy switching between the two cases. Also not a fan of the 100 deg cone in L1, as this will even limit the space in which the aircraft tries to go back to the waypoint. Having the switch logic occur at either in the acceptance radius or passed the terminal waypoint simplifies all this. |


As L1 is basically the same controller just with less features and less generality, I don't really see the need to keep it if it is only a question of these two particular formulations. The future question would be if there are other specialized guidance laws (very different from these two), or path following approaches others may want to include .. in which case we should anyway strive towards a more generic framework that can handle this without all the messy conditionals and repeat code / parameters. |
|
@tstastny Could you rebase the PR to resolve the conflicts? I would say we try to get this in as is, and try to deal with possible improvements on a separate PR |
Done. Squashed all the review comment commits. Also needs #18996 merged first. Handles case shown #18810 (comment). NPFG and fw pos ctrl logic wise... nothing has changed, but it seems there may have been some estimator or airspeed selector logic change since before the rebase? When I try to simulate with high winds the airspeed is getting disabled (and thus the wind estimate canceled). @sfuhrer has there been any augmentation to the airspeed estimation checks or something related I could look into to find why airspeed is failing now? |
|
@dagar I removed controller switching and allow default wind mitigation strategies with NPFG now on 9c94fb5 as discussed. |
|
rebased on master following #18996 merge |
The validator definitely doesn't like high wind, at least in SITL (on real vehicles we didn't have issues so far with up to 14 m/s). I've patched it with #19011, and would like to spend more time soon to understand what's exactly going on. #19011 is mainly there to unblock testing in high winds once this one is in. |
There was a problem hiding this comment.
I've tested it quite extensively again in SITL, including simulating airspeed failures and giving npfg wrong wind estimates.The airspeed-less behavior is good, the legacy "groundspeed undershoot" logic seems to work fine together with npfg.
It is also able to keep tracking the loiter reasonably well with wind estimate that's 90° off at 10m/s wind (airspeed = 15), see printscreen. Assuming that even such a big wind estimate error really shouldn't happen in a real flight I would consider it pretty safe to bring in (but think about how we could estimate the validity of the current wind estimate and switch back to non-windy guidance in that case).

|
This pull request has been mentioned on Discussion Forum for PX4, Pixhawk, QGroundControl, MAVSDK, MAVLink. There might be relevant details there: https://discuss.px4.io/t/px4-fixed-wing-mission-acceptance-radius/34693/5 |
Describe problem solved by this pull request
High winds can degrade position tracking performance of slow-flying fixed-wing vehicles (or VTOL platforms in transitional states). Current mitigation logic in the fixed-wing position controller is based on an arbitrary threshold leading to jumpy behavior when winds rise close to the vehicle's nominal airspeed, see
PX4-Autopilot/src/modules/fw_pos_control_l1/FixedwingPositionControl.cpp
Lines 2113 to 2116 in 495f1c9
and inefficient (w.r.t. energy demands.. see similar discussion on ground speed undershoot / air-ground angle in #10219), see
PX4-Autopilot/src/modules/fw_pos_control_l1/FixedwingPositionControl.cpp
Lines 384 to 395 in 495f1c9
Further, wind is currently estimated onboard, but not used to aid any higher level control loops.
Describe your solution
This PR adds an optional new library with an implementation of a more generalized Nonlinear Path Following Guidance (NPFG) logic with excess wind handing derived for minimum energy usage (endurance optimal behavior). If enabled (via parameter), the logic replaces L1 and the current ground speed undershoot logic.
NOTE: this PR does not replace any legacy functionality by default. The intention here is to make the logic available for users comfortable with a more advanced technique, get flight feedback, suggestions, end-user experiences, and hopefully encourage the restructuring of fixed-wing guidance handling to be more modular (see later notes on repeat code!). Attempted to make a minimally invasive addition.
Primary references:
Available wind handling modes:
The higher modes fall back into the lower ones when the required airspeed setpoint is not available (max airspeed exceeded). See the following video documentation and animation of the various modes and performance in flight tests for a general / layman's recounting of the logic (more details in the above paper references)
Other features:
Gotchas:
Possible future strategies for the above points:
Why should one use this logic?
DISCLAIMER: the controller will behave almost identically to L1 in the vast majority of cases. There isn't really a need to improve nominal performance. The gains come from the wind handling logic, and the future possibility to generalize to different path shapes.
Future recommendations:
There is a lot of copied over interfacing code from the L1 controller to keep the same functionalities available while using either guidance law (e.g. the roll slew limits). Also there is a mess of if conditions throughout the already somewhat hard to read fixed-wing position controller module. Would be good to perhaps design a guidance class, where the standard desired output methods can be available in any derived class. Further.. we should separate and encapsulate navigation logic, from guidance logic, and command output filtering. For example.. everything below the this line in both the header and cpp should ideally not be part of this library..
PX4-Autopilot/src/lib/npfg/npfg.cpp
Lines 517 to 519 in ea7a562
Test data / coverage
A few simulations to more easily reproduce specific cases --
Comparison L1 + current wind mitigation logic vs wind-aware NPFG:
L1 14 m/s log: https://review.px4.io/plot_app?log=e752d5ff-4250-4d33-a0fa-48259ca71966
NPFG 14 m/s log: https://review.px4.io/plot_app?log=da1455d4-4358-4540-9845-9a848d426952
Same tuning - period = 10s, damping = 0.7, same conditions - airspeed trim = 15 m/s, wind speed = 14 m/s north.
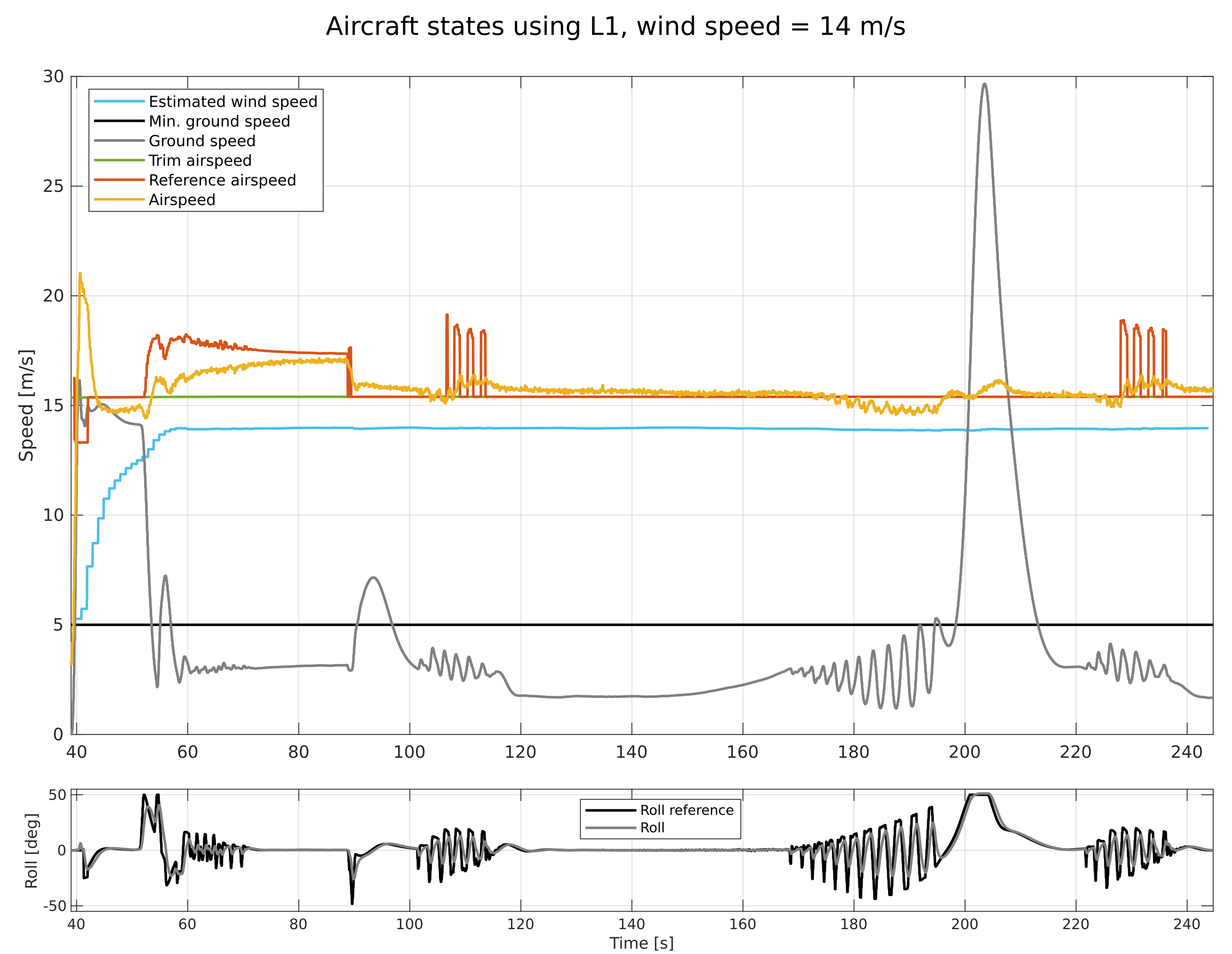
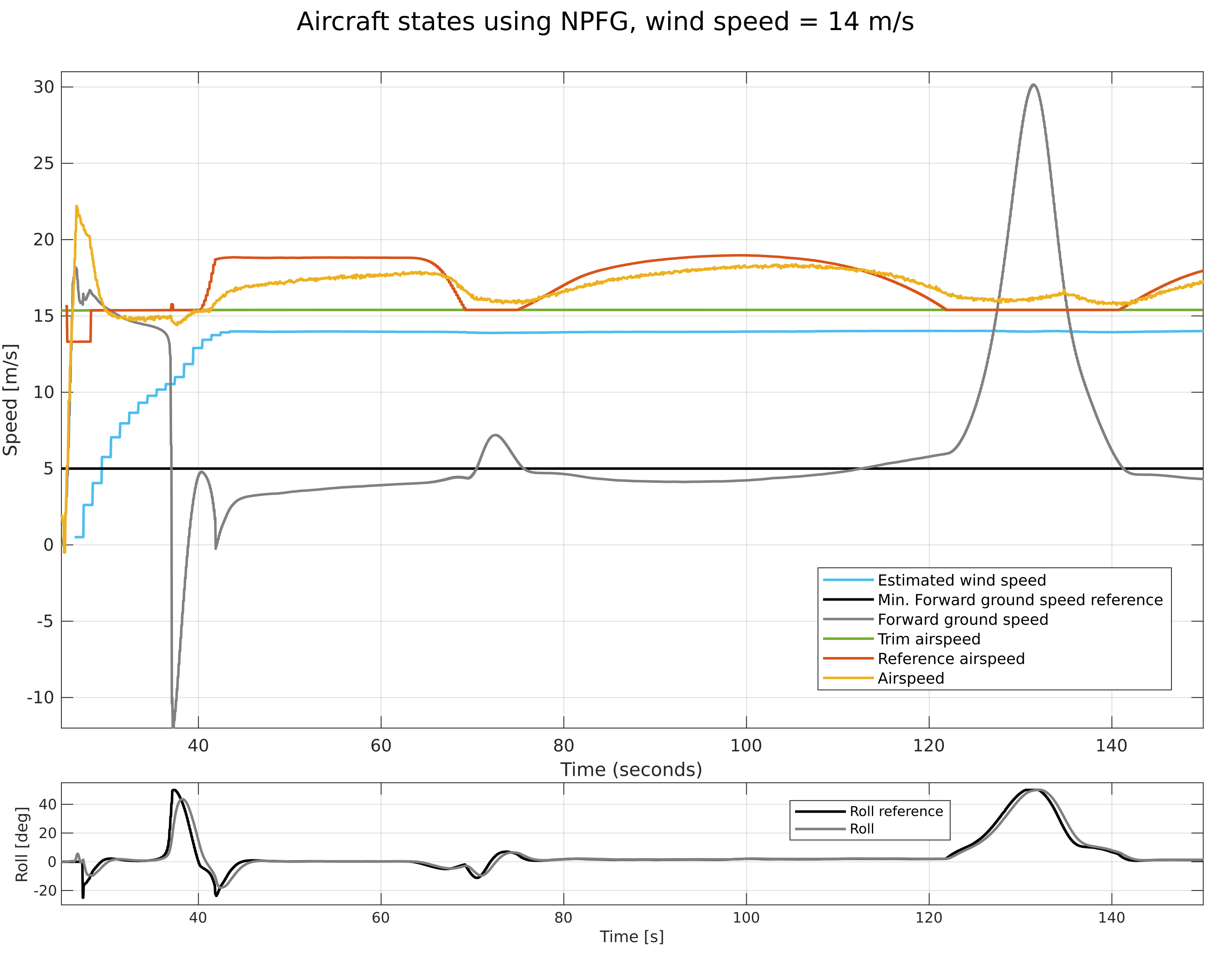
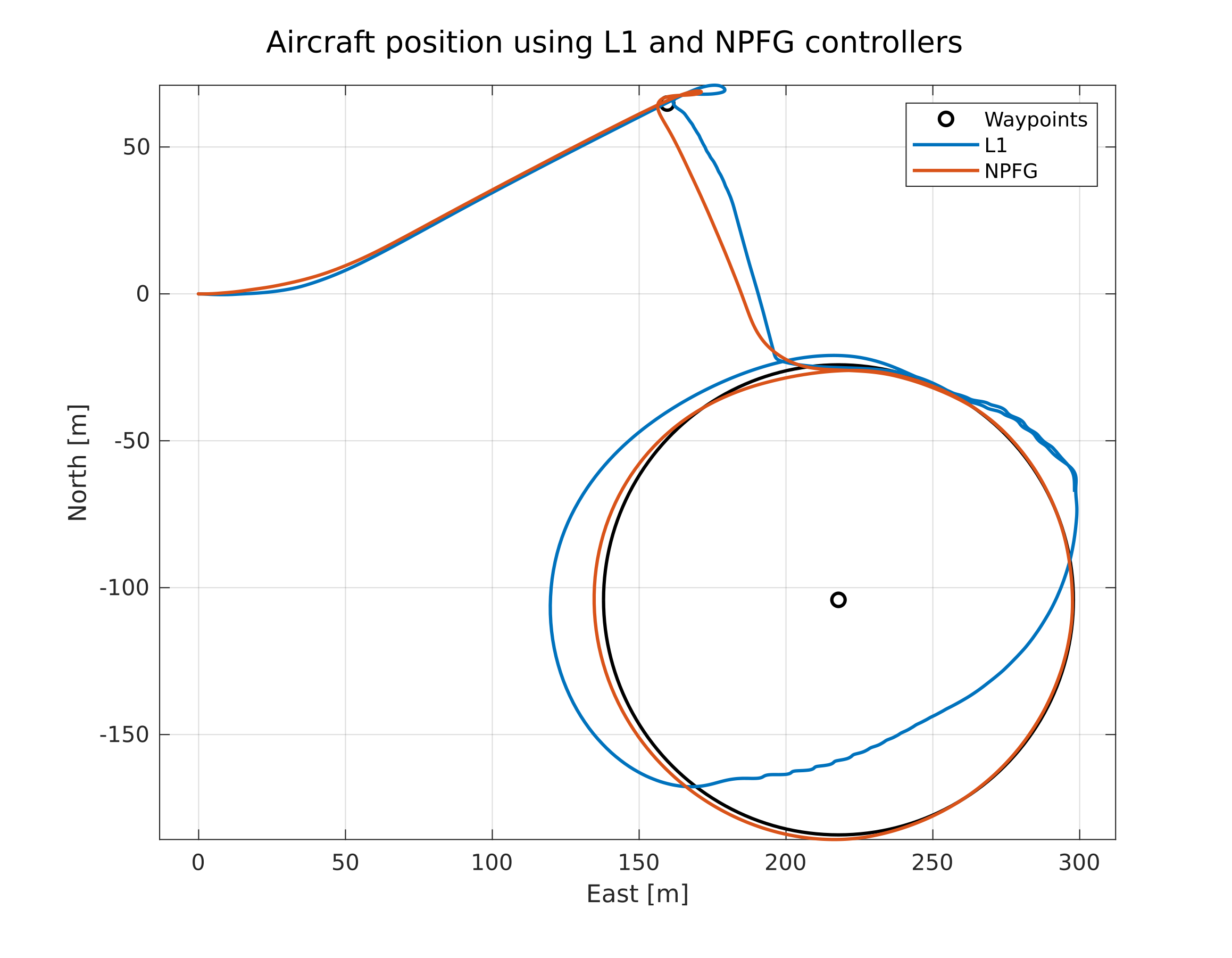
Note the jumpy roll commands about the threshold of the air-ground angle and ground speed, and drifting behavior once the threshold is undershot. Further the objective 5m/s minimum ground speed setting is not maintained. NPFG keeps the circle, maintaining the 5m/s forward, in this case, minimum ground speed, and roll commands are continuous.
Example in SITL with wind speed (17m/s) exceeding the vehicle's trim airspeed:
L1 17 m/s log: https://review.px4.io/plot_app?log=c90a1c7c-34d3-4691-8e67-71729cc354e1
NPFG 17 m/s log: https://review.px4.io/plot_app?log=ac88c8f2-844b-4519-9031-f6d262abdce3
NPFG is shown in this log using the minimum forward ground speed mode. Keeping forward ground speed of 5m/s when the max airspeed allows, and reducing airspeed to the trim value when no additional airspeed is needed (e.g. down wind legs). Further, the end of the log has a track keeping mode demonstration (with min. gsp turned off) - where it ends up returning to the track.. and sitting at very near zero ground speed. Current L1 + ground speed undershoot gets stuck in place never reaching the first loiter (but this behavior will vary depending on the side from which it approached the loiter)
Flight testing --
The logic of the controller has been flight tested quite extensively in its various iterations (see some examples in https://arxiv.org/pdf/1908.01381.pdf and https://youtu.be/oM690LO29kM of flight in very strong winds). However, this new firmware (cleaned up, rebased, etc) still should need some new flight testing validation. Also checking behavior in other modes.. hold, landing, etc.
Happy for comments, concerns, and windy flight results :) @sfuhrer @Jaeyoung-Lim @acfloria @CarlOlsson @sverling (and anyone else!)