This is release v3.3.0 (devel) of Intel® OSPRay. For changes and new features see the changelog. Visit http://www.ospray.org for more information.
Intel® OSPRay is an open source, scalable, and portable ray tracing engine for high-performance, high-fidelity visualization on Intel Architecture CPUs, Intel Xe GPUs, and Aarch64/ARM64 CPUs. OSPRay is part of the Intel Rendering Toolkit (Render Kit) and is released under the permissive Apache 2.0 license.
The purpose of OSPRay is to provide an open, powerful, and easy-to-use rendering library that allows one to easily build applications that use ray tracing based rendering for interactive applications (including both surface- and volume-based visualizations). OSPRay runs on anything from laptops, to workstations, to compute nodes in HPC systems.
OSPRay internally builds on top of Intel Embree, Intel Open VKL, and Intel Open Image Denoise. The CPU implementation is based on Intel ISPC (Implicit SPMD Program Compiler) and fully exploits modern instruction sets like Intel SSE4, AVX, AVX2, AVX-512 and NEON to achieve high rendering performance. Hence, a CPU with support for at least SSE4.1 is required to run OSPRay on x86_64 architectures, or a CPU with support for NEON is required to run OSPRay on ARM64 architectures.
OSPRay’s GPU implementation (beta status) is based on the SYCL cross-platform programming language implemented by Intel oneAPI Data Parallel C++ (DPC++) and currently supports Intel Arc™ GPUs on Linux and Windows, and Intel Data Center GPU Flex and Max Series on Linux, exploiting ray tracing hardware support.
OSPRay is under active development, and though we do our best to guarantee stable release versions a certain number of bugs, as-yet-missing features, inconsistencies, or any other issues are still possible. For any such requests or findings please use OSPRay’s GitHub Issue Tracker (or, if you should happen to have a fix for it, you can also send us a pull request).
To receive release announcements simply “Watch” the OSPRay repository on GitHub.
The latest OSPRay sources are always available at the OSPRay GitHub
repository. The default master
branch should always point to the latest bugfix release.
OSPRay currently supports Linux, Mac OS X, and Windows. In addition, before you can build OSPRay you need the following prerequisites:
-
You can clone the latest OSPRay sources via:
git clone https://github.com/RenderKit/ospray.git
-
To build OSPRay you need CMake, any form of C++11 compiler (we recommend using GCC, but also support Clang, MSVC, and Intel® C++ Compiler (icc)), and standard Linux development tools.
-
Additionally you require a copy of the Intel® Implicit SPMD Program Compiler (ISPC), version 1.23.0 or later. Please obtain a release of ISPC from the ISPC downloads page. If ISPC is not found by CMake its location can be hinted with the variable
ISPC_EXECUTABLE. -
OSPRay builds on top of the Intel Rendering Toolkit (Render Kit) common library (rkcommon). The library provides abstractions for tasking, aligned memory allocation, vector math types, among others. For users who also need to build rkcommon, we recommend the default the Intel Threading Building Blocks (TBB) as tasking system for performance and flexibility reasons. TBB must be built from source when targeting ARM CPUs, or can be built from source as part of the superbuild. Alternatively you can set CMake variable
RKCOMMON_TASKING_SYSTEMtoOpenMPorInternal. -
OSPRay also heavily uses Intel Embree, installing version 4.3.3 or newer is required. If Embree is not found by CMake its location can be hinted with the variable
embree_DIR. -
OSPRay supports volume rendering (enabled by default via
OSPRAY_ENABLE_VOLUMES), which heavily uses Intel Open VKL, version 2.0.1 or newer is required. If Open VKL is not found by CMake its location can be hinted with the variableopenvkl_DIR, or disableOSPRAY_ENABLE_VOLUMES. -
OSPRay also provides an optional module implementing the
denoiserimage operation, which is enabled byOSPRAY_MODULE_DENOISER. This module requires Intel Open Image Denoise in version 2.3.0 or newer. You may need to hint the location of the library with the CMake variableOpenImageDenoise_DIR. -
For the optional MPI modules (enabled by
OSPRAY_MODULE_MPI), which provide thempiOffloadandmpiDistributeddevices, you need an MPI library and Google Snappy. -
The optional example application, the test suit and benchmarks need some version of OpenGL and GLFW as well as GoogleTest and Google Benchmark
Depending on your Linux distribution you can install these dependencies
using yum or apt-get. Some of these packages might already be
installed or might have slightly different names.
Type the following to install the dependencies using yum:
sudo yum install cmake.x86_64
sudo yum install tbb.x86_64 tbb-devel.x86_64Type the following to install the dependencies using apt-get:
sudo apt-get install cmake-curses-gui
sudo apt-get install libtbb-devUnder Mac OS X these dependencies can be installed using MacPorts:
sudo port install cmake tbbUnder Windows please directly use the appropriate installers for CMake, TBB, ISPC (for your Visual Studio version) and Embree.
To build OSPRay’s GPU module you need
- a SYCL compiler, either the open source oneAPI DPC++ Compiler 2023-10-26 or the latest Intel oneAPI DPC++/C++ Compiler
- a recent CMake, version 3.25.3 or higher
For convenience, OSPRay provides a CMake Superbuild script which will pull down OSPRay’s dependencies and build OSPRay itself. By default, the result is an install directory, with each dependency in its own directory.
Run with:
mkdir build
cd build
cmake [<OSPRAY_SOURCE_DIR>/scripts/superbuild]
cmake --build .On Windows make sure to select a 64 bit generator, e.g.
cmake -G "Visual Studio 17 2022" [<OSPRAY_SOURCE_DIR>/scripts/superbuild]The resulting install directory (or the one set with
CMAKE_INSTALL_PREFIX) will have everything in it, with one
subdirectory per dependency.
CMake options to note (all have sensible defaults):
CMAKE_INSTALL_PREFIX
will be the root directory where everything gets installed.
BUILD_JOBS
sets the number given to make -j for parallel builds.
INSTALL_IN_SEPARATE_DIRECTORIES
toggles installation of all libraries in separate or the same directory.
BUILD_OPENVKL
whether to enable volume rendering via Open VKL
BUILD_EMBREE_FROM_SOURCE
set to OFF will download a pre-built version of Embree.
BUILD_OIDN_FROM_SOURCE
set to OFF will download a pre-built version of Open Image Denoise.
OIDN_VERSION
determines which version of Open Image Denoise to pull down.
BUILD_OSPRAY_MODULE_MPI
set to ON to build OSPRay’s MPI module for data-replicated and
distributed parallel rendering on multiple nodes.
BUILD_GPU_SUPPORT
enables beta GPU support, fetching the SYCL variants of the dependencies
and builds OSPRAY_MODULE_GPU
BUILD_TBB_FROM_SOURCE
set to ON to build TBB from source (required for ARM support). The
default setting is OFF.
For the full set of options, run:
ccmake [<OSPRAY_SOURCE_DIR>/scripts/superbuild]or
cmake-gui [<OSPRAY_SOURCE_DIR>/scripts/superbuild]The superbuild can be passed a CMake Toolchain
file
to configure for cross-compilation. This is done by passing the
toolchain file when running cmake. When cross compiling it is also
likely that you’ll want to build TBB and Embree from source to ensure
they’re built for the correct target, rather than the target the Github
binaries are built for. It may also be necessary to disable specific
ISAs for the target by passing BUILD_ISA_<ISA_NAME>=OFF as well.
mkdir build
cd build
cmake --toolchain [toolchain_file.cmake] [path/to/this/directory]
-DBUILD_TBB_FROM_SOURCE=ON \
-DBUILD_EMBREE_FROM_SOURCE=ON \
<other arguments>While OSPRay supports ARM natively, it may be desirable to cross-compile
it for x86_64 to run in Rosetta depending on the application
integrating OSPRay. This can be done using the toolchain file
toolchains/macos-rosetta.cmake, and by disabling all non-SSE ISAs when
building. This can also be done by launching an x86_64 bash shell and
then compiling as usual in this environment, which will cause the
compilation chain to target x86_64. The BUILD_ISA_<ISA NAME>=OFF
flags should be passed to disable all ISAs besides SSE4 for Rosetta:
arch -x86_64 bash
mkdir build
cd build
cmake [path/to/this/directory]
-DBUILD_TBB_FROM_SOURCE=ON \
-DBUILD_EMBREE_FROM_SOURCE=ON \
-DBUILD_ISA_AVX=OFF \
-DBUILD_ISA_AVX2=OFF \
-DBUILD_ISA_AVX512=OFF \
<other arguments>Assuming the above requisites are all fulfilled, building OSPRay through CMake is easy:
-
Create a build directory, and go into it
mkdir ospray/build cd ospray/build(We do recommend having separate build directories for different configurations such as release, debug, etc.).
-
The compiler CMake will use will default to whatever the
CCandCXXenvironment variables point to. Should you want to specify a different compiler, run cmake manually while specifying the desired compiler. The default compiler on most linux machines isgcc, but it can be pointed toclanginstead by executing the following:cmake -DCMAKE_CXX_COMPILER=clang++ -DCMAKE_C_COMPILER=clang ..
CMake will now use Clang instead of GCC. If you are OK with using the default compiler on your system, then simply skip this step. Note that the compiler variables cannot be changed after the first
cmakeorccmakerun. -
Open the CMake configuration dialog
ccmake ..
-
Make sure to properly set build mode and enable the components you need, etc.; then type ’c’onfigure and ’g’enerate. When back on the command prompt, build it using
make
-
You should now have
libospray.[so,dylib]as well as a set of example applications.
On Windows using the CMake GUI (cmake-gui.exe) is the most convenient
way to configure OSPRay and to create the Visual Studio solution files:
-
Browse to the OSPRay sources and specify a build directory (if it does not exist yet CMake will create it).
-
Click “Configure” and select as generator the Visual Studio version you have; OSPRay needs “Visual Studio 15 2017 Win64” or newer, 32
bit builds are not supported, e.g., “Visual Studio 17 2022”. -
If the configuration fails because some dependencies could not be found then follow the instructions given in the error message, e.g., set the variable
embree_DIRto the folder where Embree was installed andopenvkl_DIRto where Open VKL was installed. -
Optionally change the default build options, and then click “Generate” to create the solution and project files in the build directory.
-
Open the generated
OSPRay.slnin Visual Studio, select the build configuration and compile the project.
Alternatively, OSPRay can also be built without any GUI, entirely on the console. In the Visual Studio command prompt type:
cd path\to\ospray
mkdir build
cd build
cmake -G "Visual Studio 17 2022" [-D VARIABLE=value] ..
cmake --build . --config ReleaseUse -D to set variables for CMake, e.g., the path to Embree with
“-D embree_DIR=\path\to\embree”.
You can also build only some projects with the --target switch.
Additional parameters after “--” will be passed to msbuild. For
example, to build in parallel only the OSPRay library without the
example applications use
cmake --build . --config Release --target ospray -- /mClient applications using OSPRay can find it with CMake’s
find_package() command. For example,
find_package(ospray 3.0.0 REQUIRED)finds OSPRay via OSPRay’s configuration file osprayConfig.cmake1.
Once found, the following is all that is required to use OSPRay:
target_link_libraries(${client_target} ospray::ospray)This will automatically propagate all required include paths, linked libraries, and compiler definitions to the client CMake target (either an executable or library).
Advanced users may want to link to additional targets which are exported
in OSPRay’s CMake config, which includes all installed modules. All
targets built with OSPRay are exported in the ospray:: namespace,
therefore all targets locally used in the OSPRay source tree can be
accessed from an install. For example, ospray_module_cpu can be
consumed directly via the ospray::ospray_module_cpu target. All
targets have their libraries, includes, and definitions attached to them
for public consumption (please report
bugs if this is broken!).
The following API documentation of OSPRay can also be found as a pdf document.
For a deeper explanation of the concepts, design, features and performance of OSPRay also have a look at the IEEE Vis 2016 paper “OSPRay – A CPU Ray Tracing Framework for Scientific Visualization” (49MB, or get the smaller version 1.8MB). The slides of the talk (5.2MB) are also available.
To access the OSPRay API you first need to include the OSPRay header
#include "ospray/ospray.h"where the API is compatible with C99 and C++.
To use the API, OSPRay must be initialized with a “device”. A device is
the object which implements the API. Creating and initializing a device
can be done in either of two ways: command line arguments using
ospInit or manually instantiating a device and setting parameters on
it.
The first is to do so by giving OSPRay the command line from main() by
calling
OSPError ospInit(int *argc, const char **argv);OSPRay parses (and removes) its known command line parameters from your
application’s main function. For an example see the
tutorial. For possible error codes see section Error
Handling and Status Messages. It
is important to note that the arguments passed to ospInit are
processed in order they are listed. The following parameters (which are
prefixed by convention with “--osp:”) are understood:
| Parameter | Description |
|---|---|
--osp:debug |
enables various extra checks and debug output, and disables multi-threading |
--osp:num-threads=<n> |
use n threads instead of per default using all detected hardware threads |
--osp:log-level=<str> |
set logging level; valid values (in order of severity) are none, error, warning, info, and debug |
--osp:warn-as-error |
send warning and error messages through the error callback, otherwise send warning messages through the message callback; must have sufficient logLevel to enable warnings |
--osp:verbose |
shortcut for --osp:log-level=info and enable debug output on cout, error output on cerr |
--osp:vv |
shortcut for --osp:log-level=debug and enable debug output on cout, error output on cerr |
--osp:load-modules=<name>[,...] |
load one or more modules during initialization; equivalent to calling ospLoadModule(name) |
--osp:log-output=<dst> |
convenience for setting where status messages go; valid values for dst are cerr and cout |
--osp:error-output=<dst> |
convenience for setting where error messages go; valid values for dst are cerr and cout |
--osp:device=<name> |
use name as the type of device for OSPRay to create; e.g., --osp:device=cpu gives you the default cpu device; Note if the device to be used is defined in a module, remember to pass --osp:load-modules=<name> first |
--osp:set-affinity=<n> |
if 1, bind software threads to hardware threads; 0 disables binding; default is 0 |
--osp:device-params=<param>:<value>[,...] |
set one or more other device parameters; equivalent to calling ospDeviceSet*(param, value) |
Command line parameters accepted by OSPRay’s ospInit.
The second method of initialization is to explicitly create the device and possibly set parameters. This method looks almost identical to how other objects are created and used by OSPRay (described in later sections). The first step is to create the device with
OSPDevice ospNewDevice(const char *type);where the type string maps to a specific device implementation. OSPRay
always provides the “cpu” device, which maps to a fast, local CPU
implementation. Other devices can also be added through additional
modules, such as distributed MPI device implementations. See next
Chapter for details.
Once a device is created, you can call
void ospDeviceSetParam(OSPObject, const char *id, OSPDataType type, const void *mem);to set parameters on the device. The semantics of setting parameters is
exactly the same as ospSetParam, which is documented below in the
parameters section. The following parameters can be set
on all devices:
| Type | Name | Description |
|---|---|---|
| int | numThreads | number of threads which OSPRay should use |
| bool | disableMipMapGeneration | disable the default generation of MIP maps for textures (e.g., to save the additional memory needed) |
| uint | logLevel | logging level; valid values (in order of severity) are OSP_LOG_NONE, OSP_LOG_ERROR, OSP_LOG_WARNING, OSP_LOG_INFO, and OSP_LOG_DEBUG |
| string | logOutput | convenience for setting where status messages go; valid values are cerr and cout |
| string | errorOutput | convenience for setting where error messages go; valid values are cerr and cout |
| bool | debug | set debug mode; equivalent to logLevel=debug and numThreads=1 |
| bool | warnAsError | send warning and error messages through the error callback, otherwise send warning messages through the message callback; must have sufficient logLevel to enable warnings |
| bool | setAffinity | bind software threads to hardware threads if set to 1; 0 disables binding omitting the parameter will let OSPRay choose |
Parameters shared by all devices.
Once parameters are set on the created device, the device must be committed with
void ospDeviceCommit(OSPDevice);To use the newly committed device, you must call
void ospSetCurrentDevice(OSPDevice);This then sets the given device as the object which will respond to all other OSPRay API calls.
Device handle lifetimes are managed with two calls, the first which
increments the internal reference count to the given OSPDevice
void ospDeviceRetain(OSPDevice)and the second which decrements the reference count
void ospDeviceRelease(OSPDevice)Users can change parameters on the device after initialization (from either method above), by calling
OSPDevice ospGetCurrentDevice();This function returns the handle to the device currently used to respond
to OSPRay API calls, where users can set/change parameters and recommit
the device. If changes are made to the device that is already set as the
current device, it does not need to be set as current again. Note this
API call will increment the ref count of the returned device handle, so
applications must use ospDeviceRelease when finished using the handle
to avoid leaking the underlying device object. If there is no current
device set, this will return an invalid NULL handle.
When a device is created, its reference count is initially 1. When a
device is set as the current device, it internally has its reference
count incremented. Note that ospDeviceRetain and ospDeviceRelease
should only be used with reference counts that the application tracks:
removing reference held by the current set device should be handled by
ospShutdown. Thus, ospDeviceRelease should only decrement the
reference counts that come from ospNewDevice, ospGetCurrentDevice,
and the number of explicit calls to ospDeviceRetain.
OSPRay allows applications to query runtime properties of a device in order to do enhanced validation of what device was loaded at runtime. The following function can be used to get these device-specific properties (attributes about the device, not parameter values)
int64_t ospDeviceGetProperty(OSPDevice, OSPDeviceProperty);It returns an integer value of the queried property and the following properties can be provided as parameter:
OSP_DEVICE_VERSION
OSP_DEVICE_VERSION_MAJOR
OSP_DEVICE_VERSION_MINOR
OSP_DEVICE_VERSION_PATCH
OSP_DEVICE_SO_VERSIONOSPRay’s generic device parameters can be overridden via environment
variables for easy changes to OSPRay’s behavior without needing to
change the application (variables are prefixed by convention with
“OSPRAY_”):
| Variable | Description |
|---|---|
| OSPRAY_NUM_THREADS | equivalent to --osp:num-threads |
| OSPRAY_LOG_LEVEL | equivalent to --osp:log-level |
| OSPRAY_LOG_OUTPUT | equivalent to --osp:log-output |
| OSPRAY_ERROR_OUTPUT | equivalent to --osp:error-output |
| OSPRAY_DEBUG | equivalent to --osp:debug |
| OSPRAY_WARN_AS_ERROR | equivalent to --osp:warn-as-error |
| OSPRAY_SET_AFFINITY | equivalent to --osp:set-affinity |
| OSPRAY_LOAD_MODULES | equivalent to --osp:load-modules, can be a comma separated list of modules which will be loaded in order |
| OSPRAY_DEVICE | equivalent to --osp:device: |
Environment variables interpreted by OSPRay.
Note that these environment variables take precedence over values
specified through ospInit or manually set device parameters.
The following errors are currently used by OSPRay:
| Name | Description |
|---|---|
| OSP_NO_ERROR | no error occurred |
| OSP_UNKNOWN_ERROR | an unknown error occurred |
| OSP_INVALID_ARGUMENT | an invalid argument was specified |
| OSP_INVALID_OPERATION | the operation is not allowed for the specified object |
| OSP_OUT_OF_MEMORY | there is not enough memory to execute the command |
| OSP_UNSUPPORTED_CPU | the CPU is not supported (minimum ISA is SSE4.1 on x86_64 and NEON on ARM64) |
| OSP_VERSION_MISMATCH | a module could not be loaded due to mismatching version |
Possible error codes, i.e., valid named constants of type OSPError.
These error codes are either directly return by some API functions, or are recorded to be later queried by the application via
OSPError ospDeviceGetLastErrorCode(OSPDevice);A more descriptive error message can be queried by calling
const char* ospDeviceGetLastErrorMsg(OSPDevice);Alternatively, the application can also register a callback function of type
typedef void (*OSPErrorCallback)(void *userData, OSPError, const char* errorDetails);via
void ospDeviceSetErrorCallback(OSPDevice, OSPErrorCallback, void *userData);to get notified when errors occur.
Applications may be interested in messages which OSPRay emits, whether for debugging or logging events. Applications can call
void ospDeviceSetStatusCallback(OSPDevice, OSPStatusCallback, void *userData);in order to register a callback function of type
typedef void (*OSPStatusCallback)(void *userData, const char* messageText);which OSPRay will use to emit status messages. By default, OSPRay uses a
callback which does nothing, so any output desired by an application
will require that a callback is provided. Note that callbacks for C++
std::cout and std::cerr can be alternatively set through ospInit
or the OSPRAY_LOG_OUTPUT environment variable.
Applications can clear either callback by passing NULL instead of an
actual function pointer.
OSPRay’s functionality can be extended via plugins (which we call
“modules”), which are implemented in shared libraries. To load module
name from libospray_module_<name>.so (on Linux and Mac OS X) or
ospray_module_<name>.dll (on Windows) use
OSPError ospLoadModule(const char *name);Modules are searched in OS-dependent paths. ospLoadModule returns
OSP_NO_ERROR if the plugin could be successfully loaded.
When the application is finished using OSPRay (typically on application exit), the OSPRay API should be finalized with
void ospShutdown();This API call ensures that the current device is cleaned up
appropriately. Due to static object allocation having non-deterministic
ordering, it is recommended that applications call ospShutdown before
the calling application process terminates.
All entities of OSPRay (the renderer, volumes,
geometries, lights, cameras, …)
are a logical specialization of OSPObject and share common mechanism
to deal with parameters and lifetime.
An important aspect of object parameters is that parameters do not get passed to objects immediately. Instead, parameters are not visible at all to objects until they get explicitly committed to a given object via a call to
void ospCommit(OSPObject);at which time all previously additions or changes to parameters are visible at the same time. If a user wants to change the state of an existing object (e.g., to change the origin of an already existing camera) it is perfectly valid to do so, as long as the changed parameters are recommitted.
The commit semantic allow for batching up multiple small changes, and specifies exactly when changes to objects will occur. This can impact performance and consistency for devices crossing a PCI bus or across a network.
Note that OSPRay uses reference counting to manage the lifetime of all objects, so one cannot explicitly “delete” any object. Instead, to indicate that the application does not need and does not access the given object anymore, call
void ospRelease(OSPObject);This decreases its reference count and if the count reaches 0 the
object will automatically get deleted. Passing NULL is not an error.
Note that every handle returned via the API needs to be released when
the object is no longer needed, to avoid memory leaks.
Sometimes applications may want to have more than one reference to an object, where it is desirable for the application to increment the reference count of an object. This is done with
void ospRetain(OSPObject);It is important to note that this is only necessary if the application
wants to call ospRelease on an object more than once: objects which
contain other objects as parameters internally increment/decrement ref
counts and should not be explicitly done by the application.
Parameters allow to configure the behavior of and to pass data to
objects. However, objects do not have an explicit interface for
reasons of high flexibility and a more stable compile-time API. Instead,
parameters are passed separately to objects in an arbitrary order, and
unknown parameters will simply be ignored (though a warning message will
be posted). The following function allows adding various types of
parameters with name id to a given object:
void ospSetParam(OSPObject, const char *id, OSPDataType type, const void *mem);The valid parameter names for all OSPObjects and what types are valid
are discussed in future sections.
Note that mem must always be a pointer to the object, otherwise
accidental type casting can occur. This is especially true for pointer
types (OSP_VOID_PTR and OSPObject handles), as they will implicitly
cast to void *, but be incorrectly interpreted. To help with some of
these issues, there also exist variants of ospSetParam for specific
types, such as ospSetInt and ospSetVec3f in the OSPRay utility
library (found in ospray_util.h). Note that half precision float
parameters OSP_HALF, OSP_VEC[234]H are not supported.
Users can also remove parameters that have been explicitly set from
ospSetParam. Any parameters which have been removed will go back to
their default value during the next commit unless a new parameter was
set after the parameter was removed. To remove a parameter, use
void ospRemoveParam(OSPObject, const char *id);OSPRay consumes data arrays from the application using a specific object
type, OSPData. There are several components to describing a data
array: element type, 1/2/3 dimensional striding, and whether the array
is shared with the application or copied into opaque, OSPRay-owned
memory.
Shared data arrays require that the application’s array memory outlives
the lifetime of the created OSPData, as OSPRay is referring to
application memory. Where this is not preferable, applications use
opaque arrays to allow the OSPData to own the lifetime of the array
memory. However, opaque arrays dictate the cost of copying data into it,
which should be kept in mind.
Thus, the most efficient way to specify a data array from the application is to created a shared data array, which is done with
OSPData ospNewSharedData(const void *sharedData,
OSPDataType,
uint64_t numItems1,
int64_t byteStride1 = 0,
uint64_t numItems2 = 1,
int64_t byteStride2 = 0,
uint64_t numItems3 = 1,
int64_t byteStride3 = 0,
OSPDeleterCallback = NULL,
void *userData = NULL);The call returns an OSPData handle to the created array. The calling
program guarantees that the sharedData pointer will remain valid for
the duration that this data array is being used. The number of elements
numItems must be positive (there cannot be an empty data object). The
data is arranged in three dimensions, with specializations to two or one
dimension (if some numItems are 1). The distance between consecutive
elements (per dimension) is given in bytes with byteStride and can
also be negative. If byteStride is zero it will be determined
automatically (e.g., as sizeof(type)). Strides do not need to be
ordered, i.e., byteStride2 can be smaller than byteStride1, which is
equivalent to a transpose. However, if the stride should be calculated,
then an ordering in dimensions is assumed to disambiguate, i.e.,
byteStride1 < byteStride2 < byteStride3.
An application can pass ownership of shared data to OSPRay (for example, when it temporarily created a modified version of its data only to make it compatible with OSPRay) by providing a deleter function that OSPRay will call whenever the time comes to deallocate the shared buffer. The deleter function has the following signature:
typedef void (*OSPDeleterCallback)(const void *userData, const void *sharedData);where sharedData will receive the address of the buffer and userData
will receive whatever additional state the function needs to perform the
deletion (both provided to ospNewSharedData when sharing the data with
OSPRay).
The enum type OSPDataType describes the different element types that
can be represented in OSPRay; valid constants are listed in the table
below.
| Type / Name | Description |
|---|---|
| OSP_DEVICE | API device object reference |
| OSP_DATA | data reference |
| OSP_OBJECT | generic object reference |
| OSP_CAMERA | camera object reference |
| OSP_FRAMEBUFFER | framebuffer object reference |
| OSP_FUTURE | future object reference |
| OSP_LIGHT | light object reference |
| OSP_MATERIAL | material object reference |
| OSP_TEXTURE | texture object reference |
| OSP_RENDERER | renderer object reference |
| OSP_WORLD | world object reference |
| OSP_GROUP | group object reference |
| OSP_INSTANCE | instance object reference |
| OSP_GEOMETRY | geometry object reference |
| OSP_GEOMETRIC_MODEL | geometric model object reference |
| OSP_VOLUME | volume object reference |
| OSP_VOLUMETRIC_MODEL | volumetric model object reference |
| OSP_TRANSFER_FUNCTION | transfer function object reference |
| OSP_IMAGE_OPERATION | image operation object reference |
| OSP_STRING | C-style zero-terminated character string |
| OSP_BOOL | 8 bit boolean |
| OSP_CHAR, OSP_VEC[234]C | 8 bit signed character scalar and [234]-element vector |
| OSP_UCHAR, OSP_VEC[234]UC | 8 bit unsigned character scalar and [234]-element vector |
| OSP_SHORT, OSP_VEC[234]S | 16 bit unsigned integer scalar and [234]-element vector |
| OSP_USHORT, OSP_VEC[234]US | 16 bit unsigned integer scalar and [234]-element vector |
| OSP_INT, OSP_VEC[234]I | 32 bit signed integer scalar and [234]-element vector |
| OSP_UINT, OSP_VEC[234]UI | 32 bit unsigned integer scalar and [234]-element vector |
| OSP_LONG, OSP_VEC[234]L | 64 bit signed integer scalar and [234]-element vector |
| OSP_ULONG, OSP_VEC[234]UL | 64 bit unsigned integer scalar and [234]-element vector |
| OSP_HALF, OSP_VEC[234]H | 16 bit half precision floating-point scalar and [234]-element vector (IEEE 754 binary16) |
| OSP_FLOAT, OSP_VEC[234]F | 32 bit single precision floating-point scalar and [234]-element vector |
| OSP_DOUBLE, OSP_VEC[234]D | 64 bit double precision floating-point scalar and [234]-element vector |
| OSP_BOX[1234]I | 32 bit integer box (lower + upper bounds) |
| OSP_BOX[1234]F | 32 bit single precision floating-point box (lower + upper bounds) |
| OSP_LINEAR[23]F | 32 bit single precision floating-point linear transform ([23] vectors) |
| OSP_AFFINE[23]F | 32 bit single precision floating-point affine transform (linear transform plus translation) |
| OSP_QUATF | 32 bit single precision floating-point quaternion, in |
| OSP_VOID_PTR | raw memory address (only found in module extensions) |
Valid named constants for OSPDataType.
If the elements of the array are handles to objects, then their reference counter is incremented.
An opaque OSPData with memory allocated by OSPRay is created with
OSPData ospNewData(OSPDataType,
uint64_t numItems1,
uint64_t numItems2 = 1,
uint64_t numItems3 = 1);To allow for (partial) copies or updates of data arrays use
void ospCopyData(const OSPData source,
OSPData destination,
uint64_t destinationIndex1 = 0,
uint64_t destinationIndex2 = 0,
uint64_t destinationIndex3 = 0);which will copy the whole2 content of the source array into
destination at the given location destinationIndex. The
OSPDataTypes of the data objects must match. The region to be copied
must be valid inside the destination, i.e., in all dimensions,
destinationIndex + sourceSize <= destinationSize. The affected region
[destinationIndex, destinationIndex + sourceSize) is marked as dirty,
which may be used by OSPRay to only process or update that sub-region
(e.g., updating an acceleration structure). If the destination array is
shared with OSPData by the application (created with
ospNewSharedData), then
- the source array must be shared as well (thus
ospCopyDatacannot be used to read opaque data) - if source and destination memory overlaps (aliasing), then behavior is undefined
- except if source and destination regions are identical (including
matching strides), which can be used by application to mark that
region as dirty (instead of the whole
OSPData)
To add a data array as parameter named id to another object call also
use
void ospSetObject(OSPObject, const char *id, OSPData);Volumes are volumetric data sets with discretely sampled values in 3D
space, typically a 3D scalar field. To create a new volume object of
given type type use
OSPVolume ospNewVolume(const char *type);Note that OSPRay’s implementation forwards type directly to Open VKL,
allowing new Open VKL volume types to be usable within OSPRay without
the need to change (or even recompile) OSPRay.
Structured volumes only need to store the values of the samples, because their addresses in memory can be easily computed from a 3D position. A common type of structured volumes are regular grids.
Structured regular volumes are created by passing the type string
“structuredRegular” to ospNewVolume. Structured volumes are
represented through an OSPData 3D array data (which may or may not
be shared with the application). The voxel data must be laid out in
xyz-order3 and can be compact (best for performance) or can have a
stride between voxels, specified through the byteStride1 parameter
when creating the OSPData. Only 1D strides are supported, additional
strides between scanlines (2D, byteStride2) and slices (3D,
byteStride3) are not.
The parameters understood by structured volumes are summarized in the table below.
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | gridOrigin | origin of the grid in object-space | |
| vec3f | gridSpacing | size of the grid cells in object-space | |
| OSPData | data | the actual voxel 3D data | |
| bool | cellCentered | false | whether the data is provided per cell (as opposed to per vertex) |
| uint | filter | OSP_VOLUME_FILTER_LINEAR |
filter used for reconstructing the field, also allowed is OSP_VOLUME_FILTER_NEAREST and OSP_VOLUME_FILTER_CUBIC
|
| uint | gradientFilter | same as filter
|
filter used during gradient computations |
| float | background | NaN |
value that is used when sampling an undefined region outside the volume domain |
Configuration parameters for structured regular volumes.
The size of the volume is inferred from the size of the 3D array data,
as is the type of the voxel values (currently supported are:
OSP_UCHAR, OSP_SHORT, OSP_USHORT, OSP_HALF, OSP_FLOAT, and
OSP_DOUBLE). Data can be provided either per cell or per vertex (the
default), selectable via the cellCentered parameter (which will also
affect the computed bounding box).
Structured spherical volumes are also supported, which are created by
passing a type string of “structuredSpherical” to ospNewVolume. The
grid dimensions and parameters are defined in terms of radial distance

| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | gridOrigin | origin of the grid in units of |
|
| vec3f | gridSpacing | size of the grid cells in units of |
|
| OSPData | data | the actual voxel 3D data | |
| uint | filter | OSP_VOLUME_FILTER_LINEAR |
filter used for reconstructing the field, also allowed is OSP_VOLUME_FILTER_NEAREST
|
| uint | gradientFilter | same as filter
|
filter used during gradient computations |
| float | background | NaN |
value that is used when sampling an undefined region outside the volume domain |
Configuration parameters for structured spherical volumes.
The dimensions data, as is the type of the voxel values
(currently supported are: OSP_UCHAR, OSP_SHORT, OSP_USHORT,
OSP_HALF, OSP_FLOAT, and OSP_DOUBLE).
These grid parameters support flexible specification of spheres,
hemispheres, spherical shells, spherical wedges, and so forth. The grid
extents (computed as
[gridOrigin, gridOrigin + (dimensions - 1) * gridSpacing]) however
must be constrained such that:
$r \geq 0$ $0 \leq \theta \leq 180$ $0 \leq \phi \leq 360$
OSPRay currently supports block-structured (Berger-Colella) AMR volumes. Volumes are specified as a list of blocks, which exist at levels of refinement in potentially overlapping regions. Blocks exist in a tree structure, with coarser refinement level blocks containing finer blocks. The cell width is equal for all blocks at the same refinement level, though blocks at a coarser level have a larger cell width than finer levels.
There can be any number of refinement levels and any number of blocks at
any level of refinement. An AMR volume type is created by passing the
type string “amr” to ospNewVolume.
Blocks are defined by three parameters: their bounds, the refinement level in which they reside, and the scalar data contained within each block.
Note that cell widths are defined per refinement level, not per block.
| Type | Name | Default | Description |
|---|---|---|---|
| uint | method | OSP_AMR_CURRENT |
OSPAMRMethod sampling method. Supported methods are: |
OSP_AMR_CURRENT |
|||
OSP_AMR_FINEST |
|||
OSP_AMR_OCTANT |
|||
| float[] | cellWidth | NULL | array of each level’s cell width |
| box3i[] | block.bounds | NULL | data array of grid sizes (in voxels) for each AMR block |
| int[] | block.level | NULL | array of each block’s refinement level |
| OSPData[] | block.data | NULL |
data array of OSPData containing the actual scalar voxel data, only OSP_FLOAT is supported as OSPDataType
|
| vec3f | gridOrigin | origin of the grid | |
| vec3f | gridSpacing | size of the grid cells | |
| float | background | NaN |
value that is used when sampling an undefined region outside the volume domain |
Configuration parameters for AMR volumes.
Lastly, note that the gridOrigin and gridSpacing parameters act just
like the structured volume equivalent, but they only modify the root
(coarsest level) of refinement.
In particular, OSPRay’s / Open VKL’s AMR implementation was designed to
cover Berger-Colella [1] and Chombo [2] AMR data. The method
parameter above determines the interpolation method used when sampling
the volume.
OSP_AMR_CURRENT
finds the finest refinement level at that cell and interpolates through
this “current” level
OSP_AMR_FINEST
will interpolate at the closest existing cell in the volume-wide finest
refinement level regardless of the sample cell’s level
OSP_AMR_OCTANT
interpolates through all available refinement levels at that cell. This
method avoids discontinuities at refinement level boundaries at the cost
of performance
Details and more information can be found in the publication for the implementation [3].
- M.J. Berger and P. Colella, “Local adaptive mesh refinement for shock hydrodynamics.” Journal of Computational Physics 82.1 (1989): 64-84. DOI: 10.1016/0021-9991(89)90035-1
- M. Adams, P. Colella, D.T. Graves, J.N. Johnson, N.D. Keen, T.J. Ligocki, D.F. Martin. P.W. McCorquodale, D. Modiano. P.O. Schwartz, T.D. Sternberg, and B. Van Straalen, “Chombo Software Package for AMR Applications – Design Document”, Lawrence Berkeley National Laboratory Technical Report LBNL-6616E.
- I. Wald, C. Brownlee, W. Usher, and A. Knoll, “CPU volume rendering of adaptive mesh refinement data”. SIGGRAPH Asia 2017 Symposium on Visualization – SA ’17, 18(8), 1–8. DOI: 10.1145/3139295.3139305
Unstructured volumes can have their topology and geometry freely
defined. Geometry can be composed of tetrahedral, hexahedral, wedge or
pyramid cell types. The data format used is compatible with VTK and
consists of multiple arrays: vertex positions and values, vertex
indices, cell start indices, cell types, and cell values. An
unstructured volume type is created by passing the type string
“unstructured” to ospNewVolume.
Sampled cell values can be specified either per-vertex (vertex.data)
or per-cell (cell.data). If both arrays are set, cell.data takes
precedence.
Similar to a mesh, each cell is formed by a group of indices into the
vertices. For each vertex, the corresponding (by array index) data value
will be used for sampling when rendering, if specified. The index order
for a tetrahedron is the same as VTK_TETRA: bottom triangle
counterclockwise, then the top vertex.
For hexahedral cells, each hexahedron is formed by a group of eight
indices into the vertices and data values. Vertex ordering is the same
as VTK_HEXAHEDRON: four bottom vertices counterclockwise, then top
four counterclockwise.
For wedge cells, each wedge is formed by a group of six indices into the
vertices and data values. Vertex ordering is the same as VTK_WEDGE:
three bottom vertices counterclockwise, then top three counterclockwise.
For pyramid cells, each cell is formed by a group of five indices into
the vertices and data values. Vertex ordering is the same as
VTK_PYRAMID: four bottom vertices counterclockwise, then the top
vertex.
To maintain VTK data compatibility, the index array may be specified
with cell sizes interleaved with vertex indices in the following format:
index array
layout can be enabled through the indexPrefixed flag (in which case,
the cell.type parameter must be omitted).
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f[] | vertex.position | data array of vertex positions | |
| float[] | vertex.data | data array of vertex data values to be sampled | |
| uint32[] / uint64[] | index | data array of indices (into the vertex array(s)) that form cells | |
| bool | indexPrefixed | false | indicates that the index array is compatible to VTK, where the indices of each cell are prefixed with the number of vertices |
| uint32[] / uint64[] | cell.index | data array of locations (into the index array), specifying the first index of each cell | |
| float[] | cell.data | data array of cell data values to be sampled | |
| uint8[] | cell.type | data array of cell types (VTK compatible), only set if indexPrefixed = false. Supported types are: |
|
OSP_TETRAHEDRON |
|||
OSP_HEXAHEDRON |
|||
OSP_WEDGE |
|||
OSP_PYRAMID |
|||
| bool | hexIterative | false | hexahedron interpolation method, defaults to fast non-iterative version which could have rendering inaccuracies may appear if hex is not parallelepiped |
| bool | precomputedNormals | false | whether to accelerate by precomputing, at a cost of 12 bytes/face |
| float | background | NaN |
value that is used when sampling an undefined region outside the volume domain |
Configuration parameters for unstructured volumes.
VDB volumes implement a data structure that is very similar to the data
structure outlined in Museth [1], they are created by passing the type
string “vdb” to ospNewVolume.
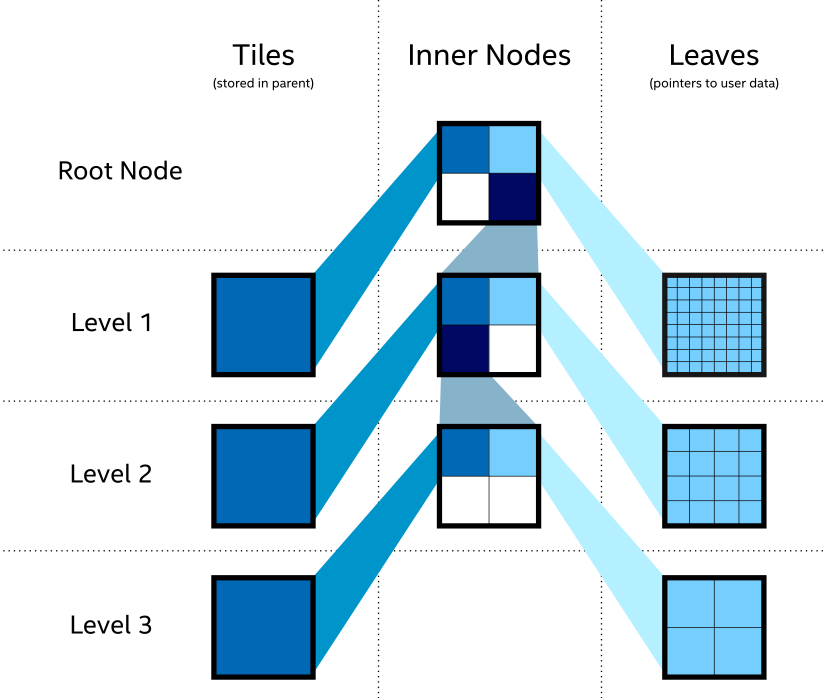
The data structure is a hierarchical regular grid at its core: Nodes are regular grids, and each grid cell may either store a constant value (this is called a tile), or child pointers. Nodes in VDB trees are wide: Nodes on the first level have a resolution of 323 voxels, on the next level 163, and on the leaf level 83 voxels. All nodes on a given level have the same resolution. This makes it easy to find the node containing a coordinate using shift operations (see [1]). VDB leaf nodes are implicit in OSPRay / Open VKL: they are stored as pointers to user-provided data.
VDB volumes interpret input data as constant cells (which are then
potentially filtered). This is in contrast to structuredRegular
volumes, which have a vertex-centered interpretation.
The VDB implementation in OSPRay / Open VKL follows the following goals:
- Efficient data structure traversal on vector architectures.
- Enable the use of industry-standard
.vdbfiles created through the OpenVDB library. - Compatibility with OpenVDB on a leaf data level, so that
.vdbfile may be loaded with minimal overhead.
VDB volumes have the following parameters:
| Type | Name | Description |
|---|---|---|
| int | maxSamplingDepth | do not descend further than to this depth during sampling, the maximum value and the default is 3 |
| uint32[] | node.level | level on which each input node exists, may be 1, 2 or 3 (levels are counted from the root level = 0 down) |
| vec3i[] | node.origin | the node origin index (per input node) |
| OSPData[] | node.data | data arrays with the node data (per input node). Nodes that are tiles are expected to have single-item arrays. Leaf-nodes with grid data expected to have compact 3D arrays in zyx layout (z changes most quickly) with the correct number of voxels for the level. Only OSP_FLOAT is supported as field OSPDataType. |
| OSPData | nodesPackedDense | optionally provided instead of node.data, a single array of all dense node data in a contiguous zyx layout, provided in the same order as the corresponding node.* parameters |
| OSPData | nodesPackedTile | optionally provided instead of node.data, a single array of all tile node data in a contiguous layout, provided in the same order as the corresponding node.* parameters |
| uint32[] | node.format | for each input node, whether it is of format OSP_VOLUME_FORMAT_DENSE_ZYX (and thus stored in nodesPackedDense), or OSP_VOLUME_FORMAT_TILE (stored in nodesPackedTile) |
| uint | filter | filter used for reconstructing the field, default is OSP_VOLUME_FILTER_LINEAR, alternatively OSP_VOLUME_FILTER_NEAREST, or OSP_VOLUME_FILTER_CUBIC. |
| uint | gradientFilter | filter used for reconstructing the field during gradient computations, default same as filter |
| float | background | value that is used when sampling an undefined region outside the volume domain, default NaN |
Configuration parameters for VDB volumes.
The nodesPackedDense and nodesPackedTile together with node.format
parameters may be provided instead of node.data; this packed data
layout may provide better performance.
- Museth, K. VDB: High-Resolution Sparse Volumes with Dynamic Topology. ACM Transactions on Graphics 32(3), 2013. DOI: 10.1145/2487228.2487235
Particle volumes consist of a set of points in space. Each point has a
position, a radius, and a weight typically associated with an attribute.
Particle volumes are created by passing the type string “particle” to
ospNewVolume.
A radial basis function defines the contribution of that particle.
Currently, we use the Gaussian radial basis function
The OSPRay / Open VKL implementation is similar to direct evaluation of samples in Reda et al. [2]. It uses an Embree-built BVH with a custom traversal, similar to the method in [1].
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f[] | particle.position | data array of particle positions | |
| float[] | particle.radius | data array of particle radii | |
| float[] | particle.weight | NULL | optional data array of particle weights, specifying the height of the kernel. |
| float | radiusSupportFactor | 3.0 | The multiplier of the particle radius required for support. Larger radii ensure smooth results at the cost of performance. In the Gaussian kernel, the radius is one standard deviation ( |
| float | clampMaxCumulativeValue | 0 | The maximum cumulative value possible, set by user. All cumulative values will be clamped to this, and further traversal (RBF summation) of particle contributions will halt when this value is reached. A value of zero or less turns this off. |
| bool | estimateValueRanges | true | Enable heuristic estimation of value ranges which are used in internal acceleration structures as well as for determining the volume’s overall value range. When set to false, the user must specify clampMaxCumulativeValue, and all value ranges will be assumed [0–clampMaxCumulativeValue]. Disabling this switch may improve volume commit time, but will make volume rendering less efficient. |
Configuration parameters for particle volumes.
-
A. Knoll, I. Wald, P. Navratil, A. Bowen, K. Reda, M.E., Papka, and K. Gaither, “RBF Volume Ray Casting on Multicore and Manycore CPUs”, 2014, Computer Graphics Forum, 33: 71–80. doi:10.1111/cgf.12363
-
K. Reda, A. Knoll, K. Nomura, M. E. Papka, A. E. Johnson and J. Leigh, “Visualizing large-scale atomistic simulations in ultra-resolution immersive environments”, 2013 IEEE Symposium on Large-Scale Data Analysis and Visualization (LDAV), Atlanta, GA, 2013, pp. 59–65.
Transfer functions map the scalar values of volumes to color and opacity
and thus they can be used to visually emphasize certain features of the
volume. To create a new transfer function of given type type use
OSPTransferFunction ospNewTransferFunction(const char *type);The returned handle can be assigned to a volumetric model (described
below) as parameter “transferFunction” using ospSetObject.
One type of transfer function that is supported by OSPRay is the linear
transfer function, which interpolates between given equidistant colors
and opacities. It is create by passing the string “piecewiseLinear” to
ospNewTransferFunction and it is controlled by these parameters:
| Type | Name | Description |
|---|---|---|
| vec3f[] | color | data array of colors (linear RGB) |
| float[] | opacity | data array of opacities |
| box1f | value | domain (scalar range) this function maps from |
Parameters accepted by the linear transfer function.
The arrays color and opacity can be of different length.
Volumes in OSPRay are given volume rendering appearance information through VolumetricModels. This decouples the physical representation of the volume (and possible acceleration structures it contains) to rendering-specific parameters (where more than one set may exist concurrently). To create a volume instance, call
OSPVolumetricModel ospNewVolumetricModel(OSPVolume);The passed volume can be NULL as long as the volume to be used is
passed as a parameter. If both a volume is specified on object creation
and as a parameter, the parameter value is used. If the parameter value
is later removed, the volume object passed on object creation is again
used.
| Type | Name | Default | Description |
|---|---|---|---|
| OSPVolume | volume | optional volume object this model references | |
| OSPTransferFunction | transferFunction | transfer function to use | |
| float | densityScale | 1.0 | makes volumes uniformly thinner or thicker |
| float | anisotropy | 0.0 | anisotropy of the (Henyey-Greenstein) phase function in [-1–1] (path tracer only), default to isotropic scattering |
| uint32 | id | -1u | optional user ID, for framebuffer channel OSP_FB_ID_OBJECT |
Parameters understood by VolumetricModel.
Geometries in OSPRay are objects that describe intersectable surfaces.
To create a new geometry object of given type type use
OSPGeometry ospNewGeometry(const char *type);Note that in the current implementation geometries are limited to a maximum of 232 primitives.
A mesh consisting of either triangles or quads is created by calling
ospNewGeometry with type string “mesh”. Once created, a mesh
recognizes the following parameters:
| Type | Name | Description |
|---|---|---|
| vec3f[] | vertex.position | data array of vertex positions, overridden by motion.* arrays |
| vec3f[] | normal | data array of face-varying normals, overridden by motion.* arrays |
| vec3f[] | vertex.normal | data array of vertex-varying normals, overridden by motion.* arrays |
| vec4f[] / vec3f[] | color | data array of face-varying colors (linear RGBA/RGB) |
| vec4f[] / vec3f[] | vertex.color | data array of vertex-varying colors (linear RGBA/RGB) |
| vec2f[] | texcoord | data array of face-varying texture coordinates |
| vec2f[] | vertex.texcoord | data array of vertex-varying texture coordinates |
| vec3ui[] / vec4ui[] | index | data array of (either triangle or quad) indices (into the vertex array(s)) |
| bool | quadSoup | when no explicit index is given, indicates whether to assume a ‘soup’ of quads instead of triangles, default false |
| vec3f[][] | motion.vertex.position | data array of vertex position arrays (uniformly distributed keys for deformation motion blur) |
| vec3f[][] | motion.normal | data array of face-varying normal arrays (uniformly distributed keys for deformation motion blur) |
| vec3f[][] | motion.vertex.normal | data array of vertex-varying normal arrays (uniformly distributed keys for deformation motion blur) |
| box1f | time | time associated with first and last key in motion.* arrays (for deformation motion blur), default [0, 1] |
Parameters defining a mesh geometry.
The data type of index arrays differentiates between the underlying
geometry, triangles are used for a index with vec3ui type and quads
for vec4ui type. Quads are internally handled as a pair of two
triangles, thus mixing triangles and quads is supported by encoding some
triangle as a quad with the last two vertex indices being identical
(w=z).
The vertex.position array is mandatory to create a valid mesh.
The index array is optional. If none is provided, a ‘triangle soup’ is
assumed, i.e., each three consecutive vertices form one triangle; unless
the boolean quadSoup is set to true, then a ‘quad soup’ is assumed
i.e., each four subsequent vertices form one quad. If the size of the
vertex.position array is not a multiple of three for triangles or four
for quads, the remainder vertices are ignored.
Face-varying attributes (normal, motion.normal, color, texcoord)
map unique values to each vertex of a primitive/face (triangle or quad),
thus attributes can be different for the same vertex that is shared by
multiple primitives. Essentially, face-varying attributes are a
‘attribute soup’ and behave similar to the implicit index, the size of
the array must be at least three times the number of triangles or four
times the number of quads, respectively. Face-varying attributes take
precedence over the respective vertex attributes (vertex.normal,
motion.vertex.normal, vertex.color, vertex.texcoord) when both
arrays of the same attribute are present.
A mesh consisting of subdivision surfaces, created by specifying a
geometry of type “subdivision”. Once created, a subdivision recognizes
the following parameters:
| Type | Name | Description |
|---|---|---|
| vec3f[] | vertex.position | data array of vertex positions |
| vec4f[] | color | optional data array of face-varying colors (linear RGBA) |
| vec4f[] | vertex.color | optional data array of vertex-varying colors (linear RGBA) |
| vec2f[] | texcoord | optional data array of vertex-varying texture coordinates |
| vec2f[] | vertex.texcoord | optional data array of vertex-varying texture coordinates |
| float | level | global level of tessellation, default 5 |
| uint[] | index | data array of indices (into the vertex array(s)) |
| float[] | index.level | optional data array of per-edge levels of tessellation, overrides global level |
| uint[] | face | optional data array holding the number of indices/edges (3 to 15) per face, defaults to 4 (a pure quad mesh) |
| vec2i[] | edgeCrease.index | optional data array of edge crease indices |
| float[] | edgeCrease.weight | optional data array of edge crease weights |
| uint[] | vertexCrease.index | optional data array of vertex crease indices |
| float[] | vertexCrease.weight | optional data array of vertex crease weights |
| uint | mode | OSPSubdivisionMode subdivision edge boundary mode, supported modes are: |
OSP_SUBDIVISION_NO_BOUNDARY |
||
OSP_SUBDIVISION_SMOOTH_BOUNDARY (default) |
||
OSP_SUBDIVISION_PIN_CORNERS |
||
OSP_SUBDIVISION_PIN_BOUNDARY |
||
OSP_SUBDIVISION_PIN_ALL |
Parameters defining a Subdivision geometry.
The vertex and index arrays are mandatory to create a valid
subdivision surface. If no face array is present then a pure quad mesh
is assumed (the number of indices must be a multiple of 4). Optionally
supported are edge and vertex creases.
A geometry consisting of individual spheres, each of which can have an
own radius, is created by calling ospNewGeometry with type string
“sphere”. The spheres will not be tessellated but rendered
procedurally and are thus perfectly round. To allow a variety of sphere
representations in the application this geometry allows a flexible way
of specifying the data of center position and radius within a
data array:
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f[] | sphere.position | data array of center positions | |
| float[] | sphere.radius | NULL | optional data array of the per-sphere radius |
| vec3f[] | sphere.normal | NULL | optional data array of normals (only for “oriented disc”) |
| vec2f[] | sphere.texcoord | NULL | optional data array of texture coordinates (constant per sphere) |
| float | radius | 0.01 | default radius for all spheres (if sphere.radius is not set) |
| uint | type | OSPSphereType for rendering the sphere. Supported types are: |
|
OSP_SPHERE (default) |
|||
OSP_DISC |
|||
OSP_ORIENTED_DISC |
Parameters defining a spheres geometry.
A geometry consisting of multiple curves is created by calling
ospNewGeometry with type string “curve”. The parameters defining
this geometry are listed in the table below.
| Type | Name | Description |
|---|---|---|
| vec4f[] | vertex.position_radius | data array of vertex position and per-vertex radius |
| vec2f[] | vertex.texcoord | data array of per-vertex texture coordinates |
| vec4f[] | vertex.color | data array of corresponding vertex colors (linear RGBA) |
| vec3f[] | vertex.normal | data array of curve normals (only for “ribbon” curves) |
| vec4f[] | vertex.tangent | data array of curve tangents (only for “hermite” curves) |
| uint32[] | index | data array of indices to the first vertex or tangent of a curve segment |
| uint | type | OSPCurveType for rendering the curve. Supported types are: |
OSP_FLAT |
||
OSP_ROUND |
||
OSP_RIBBON |
||
OSP_DISJOINT |
||
| uint | basis | OSPCurveBasis for defining the curve. Supported bases are: |
OSP_LINEAR |
||
OSP_BEZIER |
||
OSP_BSPLINE |
||
OSP_HERMITE |
||
OSP_CATMULL_ROM |
Parameters defining a curves geometry.
Positions in vertex.position_radius parameter supports per-vertex
varying radii with data type vec4f[] and instantiate Embree curves
internally for the relevant type/basis mapping.
The following section describes the properties of different curve basis’ and how they use the data provided in data buffers:
OSP_LINEAR
The indices point to the first of 2 consecutive control points in the
vertex buffer. The first control point is the start and the second
control point the end of the line segment. The curve goes through all
control points listed in the vertex buffer.
OSP_BEZIER
The indices point to the first of 4 consecutive control points in the
vertex buffer. The first control point represents the start point of the
curve, and the 4th control point the end point of the curve. The Bézier
basis is interpolating, thus the curve does go exactly through the first
and fourth control vertex.
OSP_BSPLINE
The indices point to the first of 4 consecutive control points in the
vertex buffer. This basis is not interpolating, thus the curve does in
general not go through any of the control points directly. Using this
basis, 3 control points can be shared for two continuous neighboring
curve segments, e.g., the curves
OSP_HERMITE
It is necessary to have both vertex buffer and tangent buffer for using
this basis. The indices point to the first of 2 consecutive points in
the vertex buffer, and the first of 2 consecutive tangents in the
tangent buffer. This basis is interpolating, thus does exactly go
through the first and second control point, and the first order
derivative at the begin and end matches exactly the value specified in
the tangent buffer. When connecting two segments continuously, the end
point and tangent of the previous segment can be shared.
OSP_CATMULL_ROM
The indices point to the first of 4 consecutive control points in the
vertex buffer. If
The following section describes the properties of different curve types’ and how they define the geometry of a curve:
OSP_FLAT
This type enables faster rendering as the curve is rendered as a
connected sequence of ray facing quads.
OSP_ROUND
This type enables rendering a real geometric surface for the curve which
allows closeup views. This mode renders a sweep surface by sweeping a
varying radius circle tangential along the curve.
OSP_RIBBON
The type enables normal orientation of the curve and requires a normal
buffer be specified along with vertex buffer. The curve is rendered as a
flat band whose center approximately follows the provided vertex buffer
and whose normal orientation approximately follows the provided normal
buffer. Not supported for basis OSP_LINEAR.
OSP_DISJOINT
Only supported for basis OSP_LINEAR; the segments are open and not
connected at the joints, i.e., the curve segments are either individual
cones or cylinders.
OSPRay can directly render axis-aligned bounding boxes without the need
to convert them to quads or triangles. To do so create a boxes geometry
by calling ospNewGeometry with type string “box”.
| Type | Name | Description |
|---|---|---|
| box3f[] | box | data array of boxes |
Parameters defining a boxes geometry.
OSPRay can directly render planes defined by plane equation coefficients
in its implicit form ospNewGeometry with
type string “plane”.
| Type | Name | Description |
|---|---|---|
| vec4f[] | plane.coefficients |
data array of plane coefficients |
| box3f[] | plane.bounds | optional data array of bounding boxes |
Parameters defining a planes geometry.
OSPRay can directly render multiple isosurfaces of a volume without
first tessellating them. To do so create an isosurfaces geometry by
calling ospNewGeometry with type string “isosurface”. The appearance
information of the surfaces is set through the Geometric Model.
Per-isosurface colors can be set by passing per-primitive colors to the
Geometric Model, in order of the isosurface array.
| Type | Name | Description |
|---|---|---|
| float | isovalue | single isovalues |
| float[] | isovalue | data array of isovalues |
| OSPVolume | volume | handle of the Volume to be isosurfaced |
Parameters defining an isosurfaces geometry.
Geometries are matched with surface appearance information through GeometricModels. These take a geometry, which defines the surface representation, and applies either full-object or per-primitive color and material information. To create a geometric model, call
OSPGeometricModel ospNewGeometricModel(OSPGeometry);The passed geometry can be NULL as long as the geometry to be used is
passed as a parameter. If both a geometry is specified on object
creation and as a parameter, the parameter value is used. If the
parameter value is later removed, the geometry object passed on object
creation is again used.
Color and material are fetched with the primitive ID of the hit (clamped
to the valid range, thus a single color or material is fine), or mapped
first via the index array (if present). All parameters are optional,
however, some renderers (notably the path tracer)
require a material to be set. Materials are either handles of
OSPMaterial, or indices into the material array on the
renderer, which allows to build a world which
can be used by different types of renderers.
An invertNormals flag allows to invert (shading) normal vectors of the
rendered geometry. That is particularly useful for clipping. By changing
normal vectors orientation one can control whether inside or outside of
the clipping geometry is being removed. For example, a clipping geometry
with normals oriented outside clips everything what’s inside.
| Type | Name | Description |
|---|---|---|
| OSPGeometry | geometry | optional geometry object this model references |
| OSPMaterial / OSPMaterial[] / uint32 / uint32[] | material | optional (data array of per-primitive) material, may be an index into the material parameter on the renderer (if it exists) |
| vec4f / vec4f[] | color | optional (data array of per-primitive) color assigned to the geometry (linear RGBA) |
| uint8[] | index | optional data array of per-primitive indices into color and material |
| bool | invertNormals | inverts all shading normals (Ns), default false |
| uint32 | id | optional user ID, for framebuffer channel OSP_FB_ID_OBJECT, default -1u |
Parameters understood by GeometricModel.
To create a new light source of given type type use
OSPLight ospNewLight(const char *type);All light sources accept the following parameters:
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | color | white | color of the light (linear RGB) |
| float | intensity | 1 | intensity of the light (a factor) |
| uint | intensityQuantity | OSPIntensityQuantity to set the radiometric quantity represented by intensity. The default value depends on the light source. |
|
| bool | visible | true | whether the light can be directly seen |
Parameters accepted by all lights.
In OSPRay the intensity parameter of a light source can correspond to
different types of radiometric quantities. The type of the value
represented by a light’s intensity parameter is set using
intensityQuantity, which accepts values from the enum type
OSPIntensityQuantity. The supported types of OSPIntensityQuantity
differ between the different light sources (see documentation of each
specific light source).
| Name | Description |
|---|---|
| OSP_INTENSITY_QUANTITY_POWER | the overall amount of light energy emitted by the light source into the scene, unit is W |
| OSP_INTENSITY_QUANTITY_INTENSITY | the overall amount of light emitted by the light in a given direction, unit is W/sr |
| OSP_INTENSITY_QUANTITY_RADIANCE | the amount of light emitted by a point on the light source in a given direction, unit is W/sr/m2 |
| OSP_INTENSITY_QUANTITY_IRRADIANCE | the amount of light arriving at a surface point, assuming the light is oriented towards to the surface, unit is W/m2 |
| OSP_INTENSITY_QUANTITY_SCALE | a linear scaling factor for light sources with a built-in quantity (e.g., HDRI, or sunSky, or when using intensityDistribution). |
Types of radiometric quantities used to interpret a light’s intensity
parameter.
Measured light sources (IES, EULUMDAT, …) are supported by the sphere,
spot, and quad lights when setting an intensityDistribution
data array to modulate the intensity per direction. The mapping
is using the C-γ coordinate system (see also below figure): the values
of the first (or only) dimension of intensityDistribution are
uniformly mapped to γ in [0–π]; the first intensity value to 0, the
last value to π, thus at least two values need to be present.

If the array has a second dimension then the intensities are not
rotational symmetric around the main direction (where angle γ is zero),
but are accordingly mapped to the C-halfplanes in [0–2π]; the first
“row” of values to 0 and 2π, the other rows such that they have uniform
distance to its neighbors. The orientation of the C0-plane is specified
via c0.
| Type | Name | Description |
|---|---|---|
| float[] | intensityDistribution | luminous intensity distribution for photometric lights; can be 2D for asymmetric illumination; values are assumed to be uniformly distributed |
| vec3f | c0 | orientation, i.e., direction of the C0-(half)plane (only needed if illumination via intensityDistribution is asymmetric) |
Special parameters for photometric lights.
When using an intensityDistribution then the default and only valid
value for intensityQuantity is OSP_INTENSITY_QUANTITY_SCALE.
The following light types are supported by most OSPRay renderers.
The distant light (or traditionally the directional light) is thought to
be far away (outside of the scene), thus its light arrives (almost) as
parallel rays. It is created by passing the type string “distant” to
ospNewLight. The distant light supports
OSP_INTENSITY_QUANTITY_RADIANCE and
OSP_INTENSITY_QUANTITY_IRRADIANCE (default) as intensityQuantity
parameter value. In addition to the general parameters
understood by all lights the distant light supports the following
special parameters:
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | direction | main emission direction of the distant light | |
| float | angularDiameter | 0 | apparent size (angle in degree) of the light |
Special parameters accepted by the distant light.
Setting the angular diameter to a value greater than zero will result in soft shadows when the renderer uses stochastic sampling (like the path tracer). For instance, the apparent size of the sun is about 0.53°.
The sphere light (or the special case point light) is a light emitting
uniformly in all directions from the surface toward the outside. It does
not emit any light toward the inside of the sphere. It is created by
passing the type string “sphere” to ospNewLight. The point light
supports only OSP_INTENSITY_QUANTITY_SCALE when
intensityDistribution is set, or otherwise
OSP_INTENSITY_QUANTITY_POWER, OSP_INTENSITY_QUANTITY_INTENSITY (then
default) and OSP_INTENSITY_QUANTITY_RADIANCE as intensityQuantity
parameter value. In addition to the general parameters
understood by all lights and the photometric
parameters the sphere light supports the following
special parameters:
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | position | the center of the sphere light | |
| float | radius | 0 | the size of the sphere light |
| vec3f | direction | main orientation of intensityDistribution
|
Special parameters accepted by the sphere light.
Setting the radius to a value greater than zero will result in soft shadows when the renderer uses stochastic sampling (like the path tracer).
The spotlight is a light emitting into a cone of directions. It is
created by passing the type string “spot” to ospNewLight. The
spotlight supports only OSP_INTENSITY_QUANTITY_SCALE when
intensityDistribution is set, or otherwise
OSP_INTENSITY_QUANTITY_POWER, OSP_INTENSITY_QUANTITY_INTENSITY (then
default) and OSP_INTENSITY_QUANTITY_RADIANCE as intensityQuantity
parameter value. In addition to the general parameters
understood by all lights and the photometric
parameters the spotlight supports the special
parameters listed in the table.
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | position | the center of the spotlight | |
| vec3f | direction | main emission direction of the spot | |
| float | openingAngle | 180 | full opening angle (in degree) of the spot; outside of this cone is no illumination |
| float | penumbraAngle | 5 | size (angle in degree) of the “penumbra”, the region between the rim (of the illumination cone) and full intensity of the spot; should be smaller than half of openingAngle
|
| float | radius | 0 | the size of the spotlight, the radius of a disk with normal direction
|
| float | innerRadius | 0 | in combination with radius turns the disk into a ring |
Special parameters accepted by the spotlight.

Setting the radius to a value greater than zero will result in soft shadows when the renderer uses stochastic sampling (like the path tracer). Additionally setting the inner radius will result in a ring instead of a disk emitting the light.
The quad4 light is a planar, procedural area light source emitting
uniformly on one side into the half-space. It is created by passing the
type string “quad” to ospNewLight. The quad light supports only
OSP_INTENSITY_QUANTITY_SCALE when intensityDistribution is set, or
otherwise OSP_INTENSITY_QUANTITY_POWER,
OSP_INTENSITY_QUANTITY_INTENSITY and OSP_INTENSITY_QUANTITY_RADIANCE
(then default) as intensityQuantity parameter. In addition to the
general parameters understood by all lights and the
photometric parameters the quad light supports
the following special parameters:
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | position | position of one vertex of the quad light | |
| vec3f | edge1 | vector to one adjacent vertex | |
| vec3f | edge2 | vector to the other adjacent vertex |
Special parameters accepted by the quad light.

The emission side is determined by the cross product of edge1×edge2.
which is also the main emission direction for intensityDistribution.
Note that only renderers that use stochastic sampling (like the path
tracer) will compute soft shadows from the quad light. Other renderers
will just sample the center of the quad light, which results in hard
shadows.
The cylinder light is a cylinderical, procedural area light source
emitting uniformly outwardly into the space beyond the boundary. It is
created by passing the type string “cylinder” to ospNewLight. The
cylinder light supports OSP_INTENSITY_QUANTITY_POWER,
OSP_INTENSITY_QUANTITY_INTENSITY and OSP_INTENSITY_QUANTITY_RADIANCE
(default) as intensityQuantity parameter. In addition to the general
parameters understood by all lights the cylinder light
supports the following special parameters:
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | position0 | position of the start of the cylinder | |
| vec3f | position1 | position of the end of the cylinder | |
| float | radius | 1 | radius of the cylinder |
Special parameters accepted by the cylinder light.
Note that only renderers that use stochastic sampling (like the path tracer) will compute soft shadows from the cylinder light. Other renderers will just sample the closest point on the cylinder light, which results in hard shadows.
The HDRI light is a textured light source surrounding the scene and
illuminating it from infinity. It is created by passing the type string
“hdri” to ospNewLight. The values of the HDRI correspond to radiance
and therefore the HDRI light only accepts OSP_INTENSITY_QUANTITY_SCALE
as intensityQuantity parameter value. In addition to the general
parameters the HDRI light supports the following special
parameters:
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | up | up direction of the light | |
| vec3f | direction | direction to which the center of the texture will be mapped to (analog to panoramic camera) | |
| OSPTexture | map | environment map in latitude / longitude format |
Special parameters accepted by the HDRI light.

Note that the SciVis renderer only shows the HDRI light in the background (like an environment map) without computing illumination of the scene.
The ambient light surrounds the scene and illuminates it from infinity
with constant radiance (determined by combining the parameters color
and intensity). It is created by passing the type string
“ambient” to ospNewLight. The ambient light supports
OSP_INTENSITY_QUANTITY_RADIANCE and
OSP_INTENSITY_QUANTITY_IRRADIANCE (default) as intensityQuantity
parameter value.
Note that the SciVis renderer uses ambient lights to control the color and intensity of the computed ambient occlusion (AO).
The sun-sky light is a combination of a distant light for the sun and
a procedural hdri light for the sky. It is created by passing the type
string “sunSky” to ospNewLight. The sun-sky light surrounds the
scene and illuminates it from infinity and can be used for rendering
outdoor scenes. The radiance values are calculated using the
Hošek-Wilkie sky model and solar radiance function. The underlying model
of the sun-sky light returns radiance values and therefore the light
only accepts OSP_INTENSITY_QUANTITY_SCALE as intensityQuantity
parameter value. To rescale the returned radiance of the sky model the
default value for the intensity parameter is set to 0.025. In
addition to the general parameters the following special
parameters are supported:
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | up | zenith of sky | |
| vec3f | direction | main emission direction of the sun | |
| float | turbidity | 3 | atmospheric turbidity due to particles, in [1–10] |
| float | albedo | 0.3 | ground reflectance, in [0–1] |
| float | horizonExtension | 0.01 | extend the sky dome by stretching the horizon, fraction of the lower hemisphere to cover, in [0–1] |
Special parameters accepted by the sunSky light.
The lowest elevation for the sun is restricted to the horizon.
Note that the SciVis renderer only computes illumination from the sun (yet the sky is still shown in the background, like an environment map).
The path tracer will consider illumination by geometries which have a light emitting material assigned (for example the Luminous or Principled material).
Materials describe how light interacts with surfaces, they give objects
their distinctive look. To create a new material of given type type
call
OSPMaterial ospNewMaterial(const char *material_type);The returned handle can then be used to assign the material to a given geometry with
void ospSetObject(OSPGeometricModel, "material", OSPMaterial);The OBJ material is the workhorse material supported by both the SciVis
renderer and the path tracer (the
Ambient Occlusion renderer only uses the
kd and d parameter). It offers widely used common properties like
diffuse and specular reflection and is based on the MTL material
format of Lightwave’s OBJ scene
files. To create an OBJ material pass the type string “obj” to
ospNewMaterial. Its main parameters are
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | kd | white 0.8 | diffuse color (linear RGB) |
| vec3f | ks | black | specular color (linear RGB) |
| float | ns | 10 | shininess (Phong exponent), usually in [2–104] |
| float | d | opaque | opacity |
| vec3f | tf | black | transparency filter color (linear RGB) |
| OSPTexture | map_bump | NULL | normal map |
Main parameters of the OBJ material.
In particular when using the path tracer it is important to adhere to
the principle of energy conservation, i.e., that the amount of light
reflected by a surface is not larger than the light arriving. Therefore
the path tracer issues a warning and renormalizes the color parameters
if the sum of kd, ks, and tf is larger than one in any color
channel. Similarly important to mention is that almost all materials of
the real world reflect at most only about 80% of the incoming light. So
even for a white sheet of paper or white wall paint do better not set
kd larger than 0.8; otherwise rendering times are unnecessary long and
the contrast in the final images is low (for example, the corners of a
white room would hardly be discernible, as can be seen in the figure
below).
If present, the color component of geometries is also
used for the diffuse color kd and the alpha component is also used for
the opacity d.
Normal mapping can simulate small geometric features via the texture
map_bump. The normals

Note that tf colored transparency is implemented in the SciVis and the
path tracer but normal mapping with map_bump is currently supported in
the path tracer only.
All parameters (except tf) can be textured by passing a
texture handle, prefixed with “map_”. The fetched texels
are multiplied by the respective parameter value. If only the texture is
given (but not the corresponding parameter), only the texture is used
(the default value of the parameter is not multiplied). The color
textures map_kd and map_ks are typically in one of the sRGB gamma
encoded formats, whereas textures map_ns and map_d are usually in a
linear format (and only the first component is used). Additionally, all
textures support texture transformations.
The Principled material is the most complex material offered by the
path tracer, which is capable of producing a wide
variety of materials (e.g., plastic, metal, wood, glass) by combining
multiple different layers and lobes. It uses the GGX microfacet
distribution with approximate multiple scattering for dielectrics and
metals, uses the Oren-Nayar model for diffuse reflection, and is energy
conserving. To create a Principled material, pass the type string
“principled” to ospNewMaterial. Its parameters are listed in the
table below.
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | baseColor | white 0.8 | base reflectivity (diffuse and/or metallic, linear RGB) |
| vec3f | edgeColor | white | edge tint (metallic only, linear RGB) |
| float | metallic | 0 | mix between dielectric (diffuse and/or specular) and metallic (specular only with complex IOR) in [0–1] |
| float | diffuse | 1 | diffuse reflection weight in [0–1] |
| float | specular | 1 | specular reflection/transmission weight in [0–1] |
| bool | specularMetallic | true | whether specular influences metallic |
| float | ior | 1 | dielectric index of refraction |
| float | transmission | 0 | specular transmission weight in [0–1] |
| vec3f | transmissionColor | white | attenuated color due to transmission (Beer’s law, linear RGB) |
| float | transmissionDepth | 1 | distance at which color attenuation is equal to transmissionColor |
| float | roughness | 0 | diffuse and specular roughness in [0–1], 0 is perfectly smooth |
| float | anisotropy | 0 | amount of specular anisotropy in [0–1] |
| float | rotation | 0 | rotation of the direction of anisotropy in [0–1], 1 is going full circle |
| float | normal | 1 | default normal map/scale for all layers |
| float | baseNormal | 1 | base normal map/scale (overrides default normal) |
| bool | thin | false | flag specifying whether the material is thin or solid |
| float | thickness | 1 | thickness of the material (thin only), affects the amount of color attenuation due to specular transmission |
| float | backlight | 0 | amount of diffuse transmission (thin only) in [0–2], 1 is 50% reflection and 50% transmission, 2 is transmission only |
| float | coat | 0 | clear coat layer weight in [0–1] |
| float | coatIor | 1.5 | clear coat index of refraction |
| vec3f | coatColor | white | clear coat color tint (linear RGB) |
| float | coatThickness | 1 | clear coat thickness, affects the amount of color attenuation |
| float | coatRoughness | 0 | clear coat roughness in [0–1], 0 is perfectly smooth |
| float | coatNormal | 1 | clear coat normal map/scale (overrides default normal) |
| float | sheen | 0 | sheen layer weight in [0–1] |
| vec3f | sheenColor | white | sheen color tint (linear RGB) |
| float | sheenTint | 0 | how much sheen is tinted from sheenColor toward baseColor |
| float | sheenRoughness | 0.2 | sheen roughness in [0–1], 0 is perfectly smooth |
| float | opacity | 1 | cut-out opacity/transparency, 1 is fully opaque |
| vec3f | emissiveColor | black | color (and intensity) of the emitted light |
Parameters of the Principled material.
All parameters can be textured by passing a texture handle,
prefixed with “map_” (e.g., “map_baseColor”). texture
transformations are supported as well.
The CarPaint material is a specialized version of the Principled
material for rendering different types of car paints. To create a
CarPaint material, pass the type string “carPaint” to
ospNewMaterial. Its parameters are listed in the table below.
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | baseColor | white 0.8 | diffuse base reflectivity (linear RGB) |
| float | roughness | 0 | diffuse roughness in [0–1], 0 is perfectly smooth |
| float | normal | 1 | normal map/scale |
| vec3f | flakeColor | Aluminium | color of metallic flakes (linear RGB) |
| float | flakeDensity | 0 | density of metallic flakes in [0–1], 0 disables flakes, 1 fully covers the surface with flakes |
| float | flakeScale | 100 | scale of the flake structure, higher values increase the amount of flakes |
| float | flakeSpread | 0.3 | flake spread in [0–1] |
| float | flakeJitter | 0.75 | flake randomness in [0–1] |
| float | flakeRoughness | 0.3 | flake roughness in [0–1], 0 is perfectly smooth |
| float | coat | 1 | clear coat layer weight in [0–1] |
| float | coatIor | 1.5 | clear coat index of refraction |
| vec3f | coatColor | white | clear coat color tint (linear RGB) |
| float | coatThickness | 1 | clear coat thickness, affects the amount of color attenuation |
| float | coatRoughness | 0 | clear coat roughness in [0–1], 0 is perfectly smooth |
| float | coatNormal | 1 | clear coat normal map/scale |
| vec3f | flipflopColor | white | reflectivity of coated flakes at grazing angle, used together with coatColor produces a pearlescent paint (linear RGB) |
| float | flipflopFalloff | 1 | flip flop color falloff, 1 disables the flip flop effect |
Parameters of the CarPaint material.
All parameters can be textured by passing a texture handle,
prefixed with “map_” (e.g., “map_baseColor”). texture
transformations are supported as well.
The path tracer offers a physical metal, supporting
changing roughness and realistic color shifts at edges. To create a
Metal material pass the type string “metal” to ospNewMaterial. Its
parameters are
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f[] | ior | Aluminium | data array of spectral samples of complex refractive index, each entry in the form (wavelength, eta, k), ordered by wavelength (which is in nm) |
| vec3f | eta | RGB complex refractive index, real part | |
| vec3f | k | RGB complex refractive index, imaginary part | |
| float | roughness | 0.1 | roughness in [0–1], 0 is perfect mirror |
Parameters of the Metal material.
The main appearance (mostly the color) of the Metal material is
controlled by the physical parameters eta and k, the
wavelength-dependent, complex index of refraction. These coefficients
are quite counter-intuitive but can be found in published
measurements. For accuracy the index of
refraction can be given as an array of spectral samples in ior, each
sample a triplet of wavelength (in nm), eta, and k, ordered
monotonically increasing by wavelength; OSPRay will then calculate the
Fresnel in the spectral domain. Alternatively, eta and k can also be
specified as approximated RGB coefficients; some examples are given in
below table.
| Metal | eta | k |
|---|---|---|
| Ag, Silver | (0.051, 0.043, 0.041) | (5.3, 3.6, 2.3) |
| Al, Aluminium | (1.5, 0.98, 0.6) | (7.6, 6.6, 5.4) |
| Au, Gold | (0.07, 0.37, 1.5) | (3.7, 2.3, 1.7) |
| Cr, Chromium | (3.2, 3.1, 2.3) | (3.3, 3.3, 3.1) |
| Cu, Copper | (0.1, 0.8, 1.1) | (3.5, 2.5, 2.4) |
Index of refraction of selected metals as approximated RGB coefficients, based on data from https://refractiveindex.info/.
The roughness parameter controls the variation of microfacets and thus
how polished the metal will look. The roughness can be modified by a
texture map_roughness (texture
transformations are supported as well) to
create notable edging effects.
The path tracer offers an alloy material, which behaves
similar to Metal, but allows for more intuitive and flexible
control of the color. To create an Alloy material pass the type string
“alloy” to ospNewMaterial. Its parameters are
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | color | white 0.9 | reflectivity at normal incidence (0 degree, linear RGB) |
| vec3f | edgeColor | white | reflectivity at grazing angle (90 degree, linear RGB) |
| float | roughness | 0.1 | roughness, in [0–1], 0 is perfect mirror |
Parameters of the Alloy material.
The main appearance of the Alloy material is controlled by the parameter
color, while edgeColor influences the tint of reflections when seen
at grazing angles (for real metals this is always 100% white). If
present, the color component of geometries is also used
for reflectivity at normal incidence color. As in Metal the
roughness parameter controls the variation of microfacets and thus how
polished the alloy will look. All parameters can be textured by passing
a texture handle, prefixed with “map_”; texture
transformations are supported as well.
The path tracer offers a realistic a glass material,
supporting refraction and volumetric attenuation (i.e., the transparency
color varies with the geometric thickness). To create a Glass material
pass the type string “glass” to ospNewMaterial. Its parameters are
| Type | Name | Default | Description |
|---|---|---|---|
| float | eta | 1.5 | index of refraction |
| vec3f | attenuationColor | white | resulting color due to attenuation (linear RGB) |
| float | attenuationDistance | 1 | distance affecting attenuation |
Parameters of the Glass material.
For convenience, the rather counter-intuitive physical attenuation
coefficients will be calculated from the user inputs in such a way, that
the attenuationColor will be the result when white light traveled
through a glass of thickness attenuationDistance.
The path tracer offers a thin glass material useful for
objects with just a single surface, most prominently windows. It models
a thin, transparent slab, i.e., it behaves as if a second, virtual
surface is parallel to the real geometric surface. The implementation
accounts for multiple internal reflections between the interfaces
(including attenuation), but neglects parallax effects due to its
(virtual) thickness. To create a such a thin glass material pass the
type string “thinGlass” to ospNewMaterial. Its parameters are
| Type | Name | Default | Description |
|---|---|---|---|
| float | eta | 1.5 | index of refraction |
| vec3f | attenuationColor | white | resulting color due to attenuation (linear RGB) |
| float | attenuationDistance | 1 | distance affecting attenuation |
| float | thickness | 1 | virtual thickness |
Parameters of the ThinGlass material.
For convenience the attenuation is controlled the same way as with the
Glass material. Additionally, the color due to attenuation can
be modulated with a texture map_attenuationColor (texture
transformations are supported as well). If
present, the color component of geometries is also used
for the attenuation color. The thickness parameter sets the (virtual)
thickness and allows for easy exchange of parameters with the (real)
Glass material; internally just the ratio between
attenuationDistance and thickness is used to calculate the resulting
attenuation and thus the material appearance.
The path tracer offers a metallic paint material,
consisting of a base coat with optional flakes and a clear coat. To
create a MetallicPaint material pass the type string “metallicPaint”
to ospNewMaterial. Its parameters are listed in the table below.
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | baseColor | white 0.8 | color of base coat (linear RGB) |
| float | flakeAmount | 0.3 | amount of flakes, in [0–1] |
| vec3f | flakeColor | Aluminium | color of metallic flakes (linear RGB) |
| float | flakeSpread | 0.5 | spread of flakes, in [0–1] |
| float | eta | 1.5 | index of refraction of clear coat |
Parameters of the MetallicPaint material.
The color of the base coat baseColor can be textured by a
texture map_baseColor, which also supports texture
transformations. If present, the color
component of geometries is also used for the color of the
base coat. Parameter flakeAmount controls the proportion of flakes in
the base coat, so when setting it to 1 the baseColor will not be
visible. The shininess of the metallic component is governed by
flakeSpread, which controls the variation of the orientation of the
flakes, similar to the roughness parameter of Metal. Note
that the effect of the metallic flakes is currently only computed on
average, thus individual flakes are not visible.
The path tracer supports the Luminous material which
emits light uniformly in all directions and which can thus be used to
turn any geometric object into a light source. It is created by passing
the type string “luminous” to ospNewMaterial. The amount of constant
radiance that is emitted is determined by combining the general
parameters of lights: color and intensity (which
essentially means that parameter intensityQuantity is not needed
because it is always OSP_INTENSITY_QUANTITY_RADIANCE).
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | color | white | color of the emitted light (linear RGB) |
| float | intensity | 1 | intensity of the light (a factor) |
| float | transparency | 0 | material transparency |
Parameters accepted by the Luminous material.
The emission can be textured by passing a map_color
texture handle, texture
transformations are supported as well.
OSPRay currently implements two texture types (texture2d and volume)
and is open for extension to other types by applications. More types may
be added in future releases.
To create a new texture use
OSPTexture ospNewTexture(const char *type);The texture2d texture type implements an image-based texture, where
its parameters are as follows
| Type | Name | Description |
|---|---|---|
| uint | format | OSPTextureFormat for the texture |
| uint | filter | default OSP_TEXTURE_FILTER_LINEAR, alternatively OSP_TEXTURE_FILTER_NEAREST |
| OSPData | data | the actual texel 2D data |
| uint / vec2ui | wrapMode | OSPTextureWrapMode for the texture coordinates s and t; supported wrap modes are: |
OSP_TEXTURE_WRAP_REPEAT (default) |
||
OSP_TEXTURE_WRAP_MIRRORED_REPEAT |
||
OSP_TEXTURE_WRAP_CLAMP_TO_EDGE |
Parameters of texture2d texture type.
The supported texture formats for texture2d are:
| Name | Description |
|---|---|
| OSP_TEXTURE_RGBA8 | 8 bit [0–255] linear components red, green, blue, alpha |
| OSP_TEXTURE_SRGBA | 8 bit sRGB gamma encoded color components, and linear alpha |
| OSP_TEXTURE_RGBA32F | 32 bit float components red, green, blue, alpha |
| OSP_TEXTURE_RGBA16F | 16 bit float components red, green, blue, alpha |
| OSP_TEXTURE_RGB8 | 8 bit [0–255] linear components red, green, blue |
| OSP_TEXTURE_SRGB | 8 bit sRGB gamma encoded components red, green, blue |
| OSP_TEXTURE_RGB32F | 32 bit float components red, green, blue |
| OSP_TEXTURE_RGB16F | 16 bit float components red, green, blue |
| OSP_TEXTURE_R8 | 8 bit [0–255] linear single component red |
| OSP_TEXTURE_RA8 | 8 bit [0–255] linear two components red, alpha |
| OSP_TEXTURE_L8 | 8 bit [0–255] gamma encoded luminance (replicated into red, green, blue) |
| OSP_TEXTURE_LA8 | 8 bit [0–255] gamma encoded luminance, and linear alpha |
| OSP_TEXTURE_RA32F | 32 bit float two component red, alpha |
| OSP_TEXTURE_R32F | 32 bit float single component red |
| OSP_TEXTURE_RA16F | 16 bit float two component red, alpha |
| OSP_TEXTURE_R16F | 16 bit float single component red |
| OSP_TEXTURE_RGBA16 | 16 bit [0–65535] linear components red, green, blue, alpha |
| OSP_TEXTURE_RGB16 | 16 bit [0–65535] linear components red, green, blue |
| OSP_TEXTURE_RA16 | 16 bit [0–65535] linear two components red, alpha |
| OSP_TEXTURE_R16 | 16 bit [0–65535] linear single component red |
Supported texture formats by texture2d, i.e., valid constants of type
OSPTextureFormat.
The size of the texture is inferred from the size of the 2D array
data, which also needs have a compatible type to format. The texel
data in data starts with the texels in the lower left corner of the
texture image, like in OpenGL. Per default a texture fetch is filtered
by performing bi-linear interpolation of the nearest 2×2 texels; if
instead fetching only the nearest texel is desired (i.e., no filtering)
then pass the OSP_TEXTURE_FILTER_NEAREST flag.
Texturing with texture2d image textures requires
geometries with texture coordinates, e.g., a
mesh with vertex.texcoord provided.
The volume texture type implements texture lookups based on 3D object
coordinates of the surface hit point on the associated geometry. If the
given hit point is within the attached volume, the volume is sampled and
classified with the transfer function attached to the volume. This
implements the ability to visualize volume values (as colored by a
transfer function) on arbitrary surfaces inside the volume (as opposed
to an isosurface showing a particular value in the volume). Its
parameters are as follows
| Type | Name | Description |
|---|---|---|
| OSPVolume | volume | Volume used to generate color lookups |
| OSPTransferFunction | transferFunction | transfer function applied to volume |
Parameters of volume texture type.
TextureVolume can be used for implementing slicing of volumes with any geometry type. It enables coloring of the slicing geometry with a different transfer function than that of the sliced volume.
All materials with textures also offer to manipulate the placement of
these textures with the help of texture transformations. If so, this
convention shall be used: the following parameters are prefixed with
“texture_name.*”).
| Type | Name | Description |
|---|---|---|
| linear2f | transform | linear transformation (rotation, scale) |
| float | rotation | angle in degree, counterclockwise, around center |
| vec2f | scale | enlarge texture, relative to center |
| vec2f | translation | move texture in positive direction (right/up) |
Parameters to define 2D texture coordinate transformations.
Above parameters are combined into a single affine2d transformation
matrix and the transformations are applied in the given order. Rotation,
scale and translation are interpreted “texture centric”, i.e., their
effect seen by an user are relative to the texture (although the
transformations are applied to the texture coordinates).
| Type | Name | Description |
|---|---|---|
| affine3f | transform | linear transformation (rotation, scale) plus translation |
Parameter to define 3D volume texture transformations.
Similarly, volume texture placement can also be modified by an
affine3f transformation matrix.
To create a new camera of given type type use
OSPCamera ospNewCamera(const char *type);All cameras accept these parameters:
| Type | Name | Default | Description |
|---|---|---|---|
| vec3f | position | position of the camera | |
| vec3f | direction | main viewing direction of the camera | |
| vec3f | up | up direction of the camera | |
| affine3f | transform | identity | additional world-space transform, overridden by motion.* arrays |
| float | nearClip | 10-6 | near clipping distance |
| vec2f | imageStart | start of image region (lower left corner) | |
| vec2f | imageEnd | end of image region (upper right corner) | |
| affine3f[] | motion.transform | additional uniformly distributed world-space transforms | |
| vec3f[] | motion.scale | additional uniformly distributed world-space scale, overridden by motion.transform
|
|
| vec3f[] | motion.pivot | additional uniformly distributed world-space translation which is applied before motion.rotation (i.e., the rotation center), overridden by motion.transform
|
|
| quatf[] | motion.rotation | additional uniformly distributed world-space quaternion rotation, overridden by motion.transform
|
|
| vec3f[] | motion.translation | additional uniformly distributed world-space translation, overridden by motion.transform
|
|
| box1f | time | [0, 1] | time associated with first and last key in motion.* arrays |
| box1f | shutter | [0.5, 0.5] | start and end of shutter time (for motion blur), in [0, 1] |
| uint | shutterType | OSP_SHUTTER_GLOBAL |
OSPShutterType for motion blur, also allowed are: |
OSP_SHUTTER_ROLLING_RIGHT |
|||
OSP_SHUTTER_ROLLING_LEFT |
|||
OSP_SHUTTER_ROLLING_DOWN |
|||
OSP_SHUTTER_ROLLING_UP |
|||
| float | rollingShutterDuration | 0 | for a rolling shutter (see shutterType) the “open” time per line, in [0, shutter.upper-shutter.lower] |
Parameters accepted by all cameras.
The camera is placed and oriented in the world with position,
direction and up. Additionally, an extra transformation transform
can be specified, which will only be applied to 3D vectors (i.e.,
position, direction and up), but does not affect any sizes
(e.g., nearClip, apertureRadius, or height). The same holds for
the array of transformations motion.transform to achieve camera motion
blur (in combination with time and shutter).
OSPRay uses a right-handed coordinate system. The region of the camera
sensor that is rendered to the image can be specified in normalized
screen-space coordinates with imageStart (lower left corner) and
imageEnd (upper right corner). This can be used, for example, to crop
the image, to achieve asymmetrical view frusta, or to horizontally flip
the image to view scenes which are specified in a left-handed coordinate
system. Note that values outside the default range of [0–1] are valid,
which is useful to easily realize overscan or film gate, or to emulate a
shifted sensor.
The perspective camera implements a simple thin lens camera for
perspective rendering, supporting optionally depth of field and stereo
rendering (with the path tracer). It is created by
passing the type string “perspective” to ospNewCamera. In addition
to the general parameters understood by all cameras the
perspective camera supports the special parameters listed in the table
below.
| Type | Name | Default | Description |
|---|---|---|---|
| float | fovy | 60 | the field of view (angle in degree) of the frame’s height |
| float | aspect | 1 | ratio of width by height of the frame (and image region) |
| float | apertureRadius | 0 | size of the aperture, controls the depth of field |
| float | focusDistance | 1 | distance at where the image is sharpest when depth of field is enabled |
| bool | architectural | false | vertical edges are projected to be parallel |
| uint | stereoMode | OSP_STEREO_NONE |
OSPStereoMode for stereo rendering, also allowed are: |
OSP_STEREO_LEFT |
|||
OSP_STEREO_RIGHT |
|||
OSP_STEREO_SIDE_BY_SIDE |
|||
OSP_STEREO_TOP_BOTTOM (left eye at top half) |
|||
| float | interpupillaryDistance | 0.0635 | distance between left and right eye when stereo is enabled |
Additional parameters accepted by the perspective camera.
Note that when computing the aspect ratio a potentially set image
region (using imageStart & imageEnd) needs to be regarded as well.
In architectural photography it is often desired for aesthetic reasons
to display the vertical edges of buildings or walls vertically in the
image as well, regardless of how the camera is tilted. Enabling the
architectural mode achieves this by internally leveling the camera
parallel to the ground (based on the up direction) and then shifting
the lens such that the objects in direction dir are centered in the
image. If finer control of the lens shift is needed use imageStart &
imageEnd. Because the camera is now effectively leveled its image
plane and thus the plane of focus is oriented parallel to the front of
buildings, the whole façade appears sharp, as can be seen in the example
images below. The resolution of the framebuffer is not
altered by imageStart/imageEnd.

architectural
flag corrects the perspective projection distortion, resulting in
parallel vertical edges.
stereoMode = OSP_STEREO_SIDE_BY_SIDE.
The orthographic camera implements a simple camera with orthographic
projection, without support for depth. It is created by passing the type
string “orthographic” to ospNewCamera. In addition to the general
parameters understood by all cameras the orthographic camera
supports the following special parameters:
| Type | Name | Description |
|---|---|---|
| float | height | size of the camera’s image plane in y, in world coordinates |
| float | aspect | ratio of width by height of the frame |
Additional parameters accepted by the orthographic camera.
For convenience the size of the camera sensor, and thus the extent of
the scene that is captured in the image, can be controlled with the
height parameter. The same effect can be achieved with imageStart
and imageEnd, and both methods can be combined. In any case, the
aspect ratio needs to be set accordingly to get an undistorted image.

The panoramic camera implements a simple camera with support for stereo
rendering. It captures the complete surrounding with a latitude /
longitude mapping and thus the rendered images should best have a ratio
of 2:1. A panoramic camera is created by passing the type string
“panoramic” to ospNewCamera. It is placed and oriented in the scene
by using the general parameters understood by all cameras.
| Type | Name | Description |
|---|---|---|
| uint | stereoMode | OSPStereoMode for stereo rendering, possible values are: |
OSP_STEREO_NONE (default) |
||
OSP_STEREO_LEFT |
||
OSP_STEREO_RIGHT |
||
OSP_STEREO_SIDE_BY_SIDE |
||
OSP_STEREO_TOP_BOTTOM (left eye at top half) |
||
| float | interpupillaryDistance | distance between left and right eye when stereo is enabled, default 0.0635 |
Additional parameters accepted by the panoramic camera.

Groups in OSPRay represent collections of GeometricModels, VolumetricModels and Lights which share a common local-space coordinate system. To create a group call
OSPGroup ospNewGroup();Groups take arrays of geometric models, volumetric models, clipping geometric models and lights, but they are all optional. In other words, there is no need to create empty arrays if there are no geometries, volumes or lights in the group.
By adding OSPGeometricModels to the clippingGeometry array a
clipping geometry feature is enabled. Geometries assigned to this
parameter will be used as clipping geometries. Any supported geometry
can be used for clipping6, the only requirement is that it has to
distinctly partition space into clipping and non-clipping one. The use
of clipping geometry that is not closed or infinite could result in
rendering artifacts. User can decide which part of space is clipped by
changing shading normals orientation with the invertNormals flag of
the GeometricModel. All geometries and volumes
assigned to geometry or volume will be clipped. All clipping
geometries from all groups and Instances will be combined
together – a union of these areas will be applied to all other objects
in the world.
| Type | Name | Default | Description |
|---|---|---|---|
| OSPGeometricModel[] | geometry | NULL | data array of GeometricModels |
| OSPVolumetricModel[] | volume | NULL | data array of VolumetricModels |
| OSPGeometricModel[] | clippingGeometry | NULL | data array of GeometricModels used for clipping |
| OSPLight[] | light | NULL | data array of lights |
| bool | dynamicScene | false | tell Embree to use faster BVH build (slower ray traversal), otherwise optimized for faster ray traversal (slightly slower BVH build) |
| bool | compactMode | false | tell Embree to use a more compact BVH in memory by trading ray traversal performance |
| bool | robustMode | false | tell Embree to enable more robust ray intersection code paths (slightly slower) |
Parameters understood by groups.
Instances in OSPRay represent a single group’s placement into the world via a transform. To create and instance call
OSPInstance ospNewInstance(OSPGroup);The passed group can be NULL as long as the group to be instanced is
passed as a parameter. If both a group is specified on object creation
and as a parameter, the parameter value is used. If the parameter value
is later removed, the group object passed on object creation is again
used.
| Type | Name | Default | Description |
|---|---|---|---|
| OSPGroup | group | optional group object to be instanced | |
| affine3f | transform | identity | world-space transform for all attached geometries and volumes, overridden by motion.* arrays |
| affine3f[] | motion.transform | uniformly distributed world-space transforms | |
| vec3f[] | motion.scale | uniformly distributed world-space scale, overridden by motion.transform |
|
| vec3f[] | motion.pivot | uniformly distributed world-space translation which is applied before motion.rotation (i.e., the rotation center), overridden by motion.transform |
|
| quatf[] | motion.rotation | uniformly distributed world-space quaternion rotation, overridden by motion.transform |
|
| vec3f[] | motion.translation | uniformly distributed world-space translation, overridden by motion.transform |
|
| box1f | time | [0, 1] | time associated with first and last key in motion.* arrays (for motion blur) |
| uint32 | id | -1u | optional user ID, for framebuffer channel OSP_FB_ID_INSTANCE |
Parameters understood by instances.
Worlds are a container of scene data represented by instances. To create an (empty) world call
OSPWorld ospNewWorld();Objects are placed in the world through an array of instances. Similar to groups, the array of instances is optional: there is no need to create empty arrays if there are no instances (though there will be nothing to render).
Applications can query the world (axis-aligned) bounding box after the world has been committed. To get this information, call
OSPBounds ospGetBounds(OSPObject);The result is returned in the provided OSPBounds7 struct:
typedef struct {
float lower[3];
float upper[3];
} OSPBounds;This call can also take OSPGroup and OSPInstance as well: all other
object types will return an empty bounding box.
Finally, Worlds can be configured with parameters for making various feature/performance trade-offs (similar to groups).
| Type | Name | Default | Description |
|---|---|---|---|
| OSPInstance[] | instance | NULL | data array with handles of the instances |
| OSPLight[] | light | NULL | data array with handles of the lights |
| bool | dynamicScene | false | tell Embree to use faster BVH build (slower ray traversal), otherwise optimized for faster ray traversal (slightly slower BVH build) |
| bool | compactMode | false | tell Embree to use a more compact BVH in memory by trading ray traversal performance |
| bool | robustMode | false | tell Embree to enable more robust ray intersection code paths (slightly slower) |
Parameters understood by worlds.
A renderer is the central object for rendering in OSPRay. Different
renderers implement different features and support different materials.
To create a new renderer of given type type use
OSPRenderer ospNewRenderer(const char *type);General parameters of all renderers are
| Type | Name | Default | Description |
|---|---|---|---|
| int | pixelSamples | 1 | samples per pixel, best results when a power of 2 |
| int | maxPathLength | 20 | maximum ray recursion depth |
| float | minContribution | 0.001 | sample contributions below this value will be neglected to speedup rendering |
| float | varianceThreshold | 0 | threshold for adaptive accumulation |
| float / vec3f / vec4f | backgroundColor | black, transparent | background color and alpha (linear A/RGB/RGBA), if no map_backplate is set |
| OSPTexture | map_backplate | optional texture image used as background (use texture type texture2d) |
|
| OSPTexture | map_maxDepth | optional screen-sized float texture with maximum far distance per pixel (use texture type texture2d) |
|
| OSPMaterial[] | material | optional data array of materials which can be indexed by a GeometricModel’s material parameter |
|
| uint | pixelFilter | OSP_PIXELFILTER_GAUSS |
OSPPixelFilterType to select the pixel filter used by the renderer for antialiasing. Possible pixel filters are listed below. |
| float | mipMapBias | 0 | bias for texture MIP-mapping, balancing between sharpness/aliasing and blurriness due to prefiltering |
Parameters understood by all renderers.
OSPRay’s renderers support a feature called adaptive accumulation, which
accelerates progressive rendering by stopping the
rendering and refinement of image regions that have an estimated
variance below the varianceThreshold. This feature requires a
framebuffer with an OSP_FB_VARIANCE channel.
Per default the background of the rendered image will be transparent
black, i.e., the alpha channel holds the opacity of the rendered
objects. This eases transparency-aware blending of the image with an
arbitrary background image by the application (via the “over” operator,
i.e., $ospray.rgb + appBackground.rgb⋅(1-ospray.alpha)$). The parameter
backgroundColor or map_backplate can be used to already blend with a
constant background color or backplate texture, respectively, (and
alpha) during rendering.
OSPRay renderers support depth composition with images of other
renderers, for example to incorporate help geometries of a 3D UI that
were rendered with OpenGL. The screen-sized texture
map_maxDepth must have format OSP_TEXTURE_R32F and flag
OSP_TEXTURE_FILTER_NEAREST. The fetched values are used to limit the
distance of primary rays, thus objects of other renderers can hide
objects rendered by OSPRay.
OSPRay supports antialiasing in image space by using pixel filters,
which are aligned around the center of a pixel. The size OSPPixelFilterType enum and can be set
using the pixelFilter parameter.
| Name | Description |
|---|---|
| OSP_PIXELFILTER_POINT | a point filter only samples the center of the pixel, therefore the filter width is |
| OSP_PIXELFILTER_BOX | a uniform box filter with a width of |
| OSP_PIXELFILTER_GAUSS | a truncated, smooth Gaussian filter with a standard deviation of |
| OSP_PIXELFILTER_MITCHELL | the Mitchell-Netravali filter with a width of |
| OSP_PIXELFILTER_BLACKMAN_HARRIS | the Blackman-Harris filter with a width of |
Pixel filter types supported by OSPRay for antialiasing in image space.
OSPRay also antialiases textures with prefiltering and MIP-mapping,
which can be adjusted with parameter mipMapBias. For final frame
rendering with a high number of pixelSamples or accumulated frames
mipMapBias can be lowered (e.g., set to -0.5 or -2) to result in
sharper textures which are essentially anisotropically filtered.
Conversely, for preview rendering with just a single sample per pixel a
higher mipMapBias of 1 or 2 can reduce texture aliasing and increase
rendering speed.
The SciVis renderer is a fast ray tracer for scientific visualization
which supports volume rendering and ambient occlusion (AO). It is
created by passing the type string “scivis” to ospNewRenderer. In
addition to the general parameters understood by all
renderers, the SciVis renderer supports the following parameters:
| Type | Name | Default | Description |
|---|---|---|---|
| bool | shadows | false | whether to compute (hard) shadows |
| int | aoSamples | 0 | number of rays per sample to compute ambient occlusion |
| float | aoDistance | 1020 | maximum distance to consider for ambient occlusion |
| float | volumeSamplingRate | 1 | sampling rate for volumes |
| bool | visibleLights | false | whether light sources are potentially visible (as in the path tracer, regarding each light’s visible) |
Special parameters understood by the SciVis renderer.
Note that the intensity (and color) of AO is deduced from an ambient
light in the lights array.8 If aoSamples is zero
(the default) then ambient lights cause ambient illumination (without
occlusion).
This renderer supports only a subset of the features of the SciVis
renderer to gain performance. As the name suggest its
main shading method is ambient occlusion (AO), lights are
not considered at all. Volume rendering is supported. The Ambient
Occlusion renderer is created by passing the type string “ao” to
ospNewRenderer. In addition to the general parameters
understood by all renderers the following parameters are supported as
well:
| Type | Name | Default | Description |
|---|---|---|---|
| int | aoSamples | 1 | number of rays per sample to compute ambient occlusion |
| float | aoDistance | 1020 | maximum distance to consider for ambient occlusion |
| float | aoIntensity | 1 | ambient occlusion strength |
| float | volumeSamplingRate | 1 | sampling rate for volumes |
Special parameters understood by the Ambient Occlusion renderer.
The path tracer supports soft shadows, indirect illumination and
realistic materials. This renderer is created by passing the type string
“pathtracer” to ospNewRenderer. In addition to the general
parameters understood by all renderers the path tracer
supports the following special parameters:
| Type | Name | Default | Description |
|---|---|---|---|
| int | lightSamples | all | number of random light samples per path vertex, best results when a power of 2; per default all light sources are sampled |
| bool | limitIndirectLightSamples | true | after the first non-specular (i.e., diffuse and glossy) path vertex take (at most) a single light sample (instead of lightSamples many) |
| int | roulettePathLength | 5 | ray recursion depth at which to start Russian roulette termination |
| int | maxScatteringEvents | 20 | maximum number of non-specular (i.e., diffuse and glossy) bounces |
| float | maxContribution | ∞ | samples are clamped to this value before they are accumulated into the framebuffer |
| bool | backgroundRefraction | false | allow for alpha blending even if background is seen through refractive objects like glass |
| vec4f | shadowCatcherPlane | disabled | components of an invisible plane that captures shadow attentuations, which are blended with the background |
Special parameters understood by the path tracer.
The path tracer requires that materials are assigned to geometries, otherwise surfaces are treated as completely black.
The path tracer supports volumes with multiple scattering. The scattering albedo can be specified using the transfer function. Extinction is assumed to be spectrally constant.
Rendering an object with an HDRI light results in
realistic illumination, but the object looks detached and floats in
space. As remedy a so-called Shadow Catcher can be used by setting the
coefficients of a plane via shadowCatcherPlane, which will
ground the object by computing matching (contact) shadows. The accuracy
of the shadow estimation depends on the number of light samples per
frame (via lightSamples and/or pixelSamples), in particular when
using a high-contrast HDRI or multiple (colored) light sources. With
just a single light sample the intensity, gradient and color of the
shadows will potentially be quite off.


Applications can also perform their own compositing of the captured
shadow, because the shadow is also baked into the alpha channel (which
however means loosing the color tint of the shadow). To do so, the
backgroundColor must be transparent (alpha=0) and should be black
(otherwise the background color will bleed into the shadow); likewise,
light sources should be set to visible=false to avoid them being
visible in the background. When using the denoiser best
enable denoiseAlpha as well.

The framebuffer holds the rendered 2D image (and optionally auxiliary
information associated with pixels). To create a new framebuffer object
of given size size (in pixels), color format, and channels use
OSPFrameBuffer ospNewFrameBuffer(int size_x, int size_y,
OSPFrameBufferFormat format = OSP_FB_SRGBA,
uint32_t frameBufferChannels = OSP_FB_COLOR);The parameter format describes the format the color buffer has on the
host, and the format that ospMapFrameBuffer will eventually return.
Valid values are:
| Name | Description |
|---|---|
| OSP_FB_NONE | framebuffer will not be mapped by the application |
| OSP_FB_RGBA8 | 8 bit [0–255] linear component red, green, blue, alpha |
| OSP_FB_SRGBA | 8 bit sRGB gamma encoded color components, and linear alpha |
| OSP_FB_RGBA32F | 32 bit float components red, green, blue, alpha |
Supported color formats of the framebuffer that can be passed to
ospNewFrameBuffer, i.e., valid constants of type
OSPFrameBufferFormat.
The parameter frameBufferChannels specifies which channels the
framebuffer holds, and can be combined together by bitwise OR from the
values of OSPFrameBufferChannel listed in the table below.
| Name | Description |
|---|---|
| OSP_FB_COLOR | RGB color including alpha |
| OSP_FB_DEPTH | distance to the camera, as linear 32 bit float; euclidean or projected distance is selected via parameter projectedDepth; for multiple samples per pixel the closest is taken |
| OSP_FB_ACCUM | accumulation buffer for progressive refinement |
| OSP_FB_VARIANCE | for estimation of the current noise level if OSP_FB_ACCUM is also present, see rendering |
| OSP_FB_FIRST_NORMAL | accumulated world-space normal of the first hit, as vec3f |
| OSP_FB_NORMAL | accumulated world-space normal of the first non-specular hit (for denoising), as vec3f |
| OSP_FB_ALBEDO | accumulated material albedo (color without illumination) at the first non-specular hit (for denoising), as vec3f |
| OSP_FB_POSITION | accumulated world-space position of the first hit, as vec3f |
| OSP_FB_ID_PRIMITIVE | primitive index of the first hit, as uint32 |
| OSP_FB_ID_OBJECT | geometric/volumetric model id, if specified, or index in group of first hit, as uint32 |
| OSP_FB_ID_INSTANCE | user defined instance id, if specified, or instance index of first hit, as uint32 |
Framebuffer channels constants (of type OSPFrameBufferChannel), naming
optional information the framebuffer can store. These values can be
combined by bitwise OR when passed to ospNewFrameBuffer.
If a certain channel value is not specified, the given buffer channel
will not be present. Note that OSPRay makes a clear distinction between
the external format of the framebuffer and the internal one: The
external format is the format the user specifies in the format
parameter; it specifies what color format OSPRay will eventually
return the framebuffer to the application (when calling
ospMapFrameBuffer): no matter what OSPRay uses internally, it will
simply return a 2D array of pixels of that format, with possibly all
kinds of reformatting, compression/decompression, etc., going on
in-between the generation of the internal framebuffer and the mapping
of the externally visible one.
In particular, OSP_FB_NONE is a perfectly valid pixel format for a
framebuffer that an application will never map. For example, an
application driving a display wall may well generate an intermediate
framebuffer and eventually transfer its pixel to the individual displays
using an OSPImageOperation image operation.
The application can map the given channel of a framebuffer – and thus access the stored pixel information – via
const void *ospMapFrameBuffer(OSPFrameBuffer, OSPFrameBufferChannel = OSP_FB_COLOR);Note that OSP_FB_ACCUM or OSP_FB_VARIANCE cannot be mapped. The
origin of the screen coordinate system in OSPRay is the lower left
corner (as in OpenGL), thus the first pixel addressed by the returned
pointer is the lower left pixel of the image.
A previously mapped channel of a framebuffer can be unmapped by passing
the received pointer mapped to
void ospUnmapFrameBuffer(const void *mapped, OSPFrameBuffer);The individual channels of a framebuffer can be cleared with
void ospResetAccumulation(OSPFrameBuffer);This function will clear all accumulating buffers (OSP_FB_VARIANCE,
OSP_FB_NORMAL, and OSP_FB_ALBEDO, if present) and resets the
accumulation counter accumID. It is unspecified if the existing color
and depth buffers are physically cleared when ospResetAccumulation is
called.
If OSP_FB_VARIANCE is specified, an estimate of the variance of the
last accumulated frame can be queried with
float ospGetVariance(OSPFrameBuffer);Note this value is only updated after synchronizing with
OSP_FRAME_FINISHED, as further described in asynchronous
rendering. The estimated variance can be used
by the application as a quality indicator and thus to decide whether to
stop or to continue progressive rendering.
The framebuffer takes a list of pixel operations to be applied to the
image in sequence as an OSPData. The pixel operations will be run in
the order they are in the array.
| Type | Name | Description |
|---|---|---|
| OSPImageOperation[] | imageOperation | ordered sequence of image operations |
| int | targetFrames | anticipated number of frames that will be accumulated for progressive refinement, used renderers to generate a blue noise sampling pattern; should be a power of 2, is always 1 without OSP_FB_ACCUM; default 0 (disabled) |
| bool | projectedDepth | whether channel OSP_FB_DEPTH should hold the projected distance onto the main camera direction (which is the distance to the image plane for perspective camera and orthographic camera, can be negative for panoramic camera), default false (euclidean distance) |
Parameters accepted by the framebuffer.
If the total number of frames to be accumulated is known, then
targetFrames should be set, because then renderers can generate more
pleasing blue noise patterns. Accumulation stops when targetFrames is
reached.
Image operations are functions that are applied to every pixel of a
frame. Examples include post-processing, filtering, blending, tone
mapping, or sending tiles to a display wall. To create a new pixel
operation of given type type use
OSPImageOperation ospNewImageOperation(const char *type);The tone mapper is a pixel operation which implements a generic filmic
tone mapping operator. Using the default parameters it approximates the
Academy Color Encoding System (ACES). The tone mapper is created by
passing the type string “tonemapper” to ospNewImageOperation. The
tone mapping curve can be customized using the parameters listed in the
table below.
| Type | Name | Default | Filmic | Description |
|---|---|---|---|---|
| float | exposure | 1.0 | 1.0 | amount of light per unit area |
| float | contrast | 1.6773 | 1.1759 | contrast (toe of the curve); typically is in [1–2] |
| float | shoulder | 0.9714 | 0.9746 | highlight compression (shoulder of the curve); typically is in [0.9–1] |
| float | midIn | 0.18 | 0.18 | mid-level anchor input; default is 18% gray |
| float | midOut | 0.18 | 0.18 | mid-level anchor output; default is 18% gray |
| float | hdrMax | 11.0785 | 6.3704 | maximum HDR input that is not clipped |
| bool | acesColor | true | false | apply the ACES color transforms |
Parameters accepted by the tone mapper. The column “Filmic” lists alternative values for the popular “Uncharted 2” tone mapping curve (note that that curve includes an exposure bias to match 18% middle gray).
OSPRay comes with a module that adds support for Intel® Open Image
Denoise (OIDN). This is provided as an optional module as it creates an
additional project dependency at compile time. The module implements a
“denoiser” frame operation, which denoises the entire frame before the
frame is completed. OIDN will automatically select the fastest device,
using a GPU when available. The device selection be overridden by the
environment variable OIDN_DEFAULT_DEVICE, possible values are cpu,
sycl, cuda, hip, or a physical device ID
| Type | Name | Description |
|---|---|---|
| uint | quality | OSPDenoiserQuality for denoiser quality, default is |
OSP_DENOISER_QUALITY_MEDIUM: balanced quality/performance for interactive/real-time rendering; also allowed are: |
||
OSP_DENOISER_QUALITY_LOW: high performance, for interactive/real-time preview rendering |
||
OSP_DENOISER_QUALITY_HIGH: high quality, for final frame rendering |
||
| bool | denoiseAlpha | whether to denoise the alpha channel as well, default false |
Parameters accepted by the denoiser.
Rendering is by default asynchronous (non-blocking), and is done by combining a framebuffer, renderer, camera, and world.
What to render and how to render it depends on the renderer’s
parameters. If the framebuffer supports accumulation (i.e., it was
created with OSP_FB_ACCUM) then successive calls to ospRenderFrame
will progressively refine the rendered image (until targetFrames is
reached).
To start an render task, use
OSPFuture ospRenderFrame(OSPFrameBuffer, OSPRenderer, OSPCamera, OSPWorld);This returns an OSPFuture handle, which can be used to synchronize
with the application, cancel, or query for progress of the running task.
When ospRenderFrame is called, there is no guarantee when the
associated task will begin execution.
Progress of a running frame can be queried with the following API function
float ospGetProgress(OSPFuture);This returns the approximated progress of the task in [0-1].
Applications can cancel a currently running asynchronous operation via
void ospCancel(OSPFuture);Applications can wait on the result of an asynchronous operation, or
choose to only synchronize with a specific event. To synchronize with an
OSPFuture use
void ospWait(OSPFuture, OSPSyncEvent = OSP_TASK_FINISHED);The following are values which can be synchronized with the application
| Name | Description |
|---|---|
| OSP_NONE_FINISHED | Do not wait for anything to be finished (immediately return from ospWait) |
| OSP_WORLD_COMMITTED | Wait for the world to be committed (not yet implemented) |
| OSP_WORLD_RENDERED | Wait for the world to be rendered, but not post-processing operations (Pixel/Tile/Frame Op) |
| OSP_FRAME_FINISHED | Wait for all rendering operations to complete |
| OSP_TASK_FINISHED | Wait on full completion of the task associated with the future. The underlying task may involve one or more of the above synchronization events |
Supported events that can be passed to ospWait.
Currently only rendering can be invoked asynchronously. However, future
releases of OSPRay may add more asynchronous versions of API calls (and
thus return OSPFuture).
Applications can query whether particular events are complete with
int ospIsReady(OSPFuture, OSPSyncEvent = OSP_TASK_FINISHED);As the given running task runs (as tracked by the OSPFuture),
applications can query a boolean [0, 1] result if the passed event has
been completed.
Applications can query how long an async task ran with
float ospGetTaskDuration(OSPFuture);This returns the wall clock execution time of the task in seconds. If the task is still running, this will block until the task is completed. This is useful for applications to query exactly how long an asynchronous task executed without the overhead of measuring both task execution + synchronization by the calling application.
For convenience in certain use cases, ospray_util.h provides a
synchronous version of ospRenderFrame:
float ospRenderFrameBlocking(OSPFrameBuffer, OSPRenderer, OSPCamera, OSPWorld);This version is the equivalent of:
ospRenderFrame
ospWait(f, OSP_TASK_FINISHED)
return ospGetVariance(fb)This version is closest to ospRenderFrame from OSPRay v1.x.
The use of either ospRenderFrame or ospRenderFrameBlocking requires
that all objects in the scene being rendered have been committed before
rendering occurs. If a call to ospCommit happens while a frame is
rendered, the result is undefined behavior and should be avoided.
To get the world-space position of the geometry (if any) seen at [0–1]
normalized screen-space pixel coordinates screenPos_x and
screenPos_y use
void ospPick(OSPPickResult *,
OSPFrameBuffer,
OSPRenderer,
OSPCamera,
OSPWorld,
float screenPos_x,
float screenPos_y);The result is returned in the provided OSPPickResult struct:
typedef struct {
int hasHit;
float worldPosition[3];
OSPInstance instance;
OSPGeometricModel model;
uint32_t primID;
} OSPPickResult;Note that ospPick considers exactly the same camera of the given
renderer that is used to render an image, thus matching results can be
expected. If the camera supports depth of field then the center of the
lens and thus the center of the circle of confusion is used for picking.
Note that the caller needs to ospRelease the instance and model
handles of OSPPickResult once the information is not needed anymore.
The CPU module is implicitly loaded and the cpu device is
automatically used if no other options are specified.
To use the GPU for rendering load the gpu module and select the gpu
device:
./ospExamples --osp:load-modules=gpu --osp:device=gpuor via explicit device creation by the application:
ospLoadModule("gpu");
OSPDevice dev = ospNewDevice("gpu");
ospDeviceCommit(dev);
ospSetCurrentDevice(dev);| Type | Name | Description |
|---|---|---|
| void * | syclContext | SYCL context |
| void * | syclDevice | SYCL device |
Parameters specific to the gpu device.
Applications can set their SYCL context and device to share device
memory with OSPRay or to control which device should be used (e.g., in
case multiple GPUs are present). If neither parameter is set, the gpu
device will automatically create a context internally and select a GPU
(that selection can be influenced via environment variable
ONEAPI_DEVICE_SELECTOR, see Intel oneAPI DPC++ Compiler
documentation).
Compile times for just in time compilation (JIT compilation) can be
large. To resolve this issue we recommend enabling persistent JIT
compilation caching inside your application before the SYCL device is
created, by setting environment variables SYCL_CACHE_PERSISTENT=1 (and
optionally SYCL_CACHE_DIR=<path> to some proper directory where the
JIT cache should get stored).
To reduce GPU memory allocation overhead when rendering scenes with many
objects (geometries, instances, etc.), memory pooling should be enabled
by setting the environment variable
SYCL_PI_LEVEL_ZERO_USM_ALLOCATOR="1;0;shared:1M,0,2M". See Intel
oneAPI DPC++ Compiler
documentation
for more details.
The following features are not implemented yet or are not working correctly on the GPU device:
- Multiple volumes in the scene
- Clipping
- Motion blur
- Subdivision surfaces
- Progress reporting via
ospGetProgressor canceling the frame viaospCancel - Picking via
ospPick - Adaptive accumulation via
OSP_FB_VARIANCEandvarianceThreshold - Framebuffer channels
OSP_FB_ID_*(id buffers) - Experimental support for shared device-only data, works only for
structuredRegularvolume
There will be some delay on start-up as the kernel code is JIT compiled for the device, and similar pauses when changing the scene configuration, because the kernel specialized and re-compiled.
For some combination of compiler, GPU driver and scene the rendered images might show artifacts (e.g., vertical lines or small blocks).
The purpose of OSPRay’s MPI modules is to provide distributed rendering capabilities for OSPRay. The modules enables image- and data-parallel rendering across HPC clusters using MPI, allowing applications to transparently distribute rendering work, or to render data sets which are too large to fit in memory on a single machine.
OSPRay provides multiple MPI modules that expose different distributed
rendering capabilities. The mpi_offload module provides image-parallel
rendering through the mpiOffload device; it enables OSPRay
applications written for local rendering to be replicated across
multiple nodes to distribute the rendering work without code changes.
And the mpi_distributed_cpu and mpi_distributed_gpu modules provides
data-parallel rendering through the mpiDistributed device, which
allows MPI distributed applications to use OSPRay for distributed
rendering. Each rank using the mpiDistributed device can render an
independent piece of a global data set, or perform hybrid rendering
where ranks partially or completely share data.
The mpiDistributed device’s image-parallel rendering support can be
used to accelerate data loading for image-parallel applications, where
all ranks load the same data from a shared disk and then perform
image-parallel rendering on the replicated data, as if the mpiOffload
device where being used.
The mpiOffload device can be used to distribute image rendering tasks
across a cluster without requiring modifications to the application
itself. Existing applications using OSPRay for local rendering simply be
passed command line arguments to load the module and indicate that the
mpiOffload device should be used for image-parallel rendering. To load
the module, pass --osp:load-modules=mpi_offload, to select the
MPIOffloadDevice, pass --osp:device=mpiOffload. For example, the
ospExamples application can be run as:
mpirun -n <N> ./ospExamples --osp:load-modules=mpi_offload --osp:device=mpiOffloadand will automatically distribute the image rendering tasks among the
corresponding N nodes. Note that in this configuration rank 0 will act
as a master/application rank, and will run the user application code but
not perform rendering locally. Thus, a minimum of 2 ranks are required,
one master to run the application and one worker to perform the
rendering. Running with 3 ranks for example would now distribute half
the image rendering work to rank 1 and half to rank 2.
If more control is required over the placement of ranks to nodes, or you
want to run a worker rank on the master node as well you can run the
application and the ospray_mpi_worker program through MPI’s MPMD mode.
The ospray_mpi_worker will load the MPI module and select the offload
device by default.
mpirun -n 1 ./ospExamples --osp:load-modules=mpi_offload --osp:device=mpiOffload \
: -n <N> ./ospray_mpi_workerIf initializing the mpiOffload device manually, or passing parameters
through the command line, the following parameters can be set:
| Type | Name | Default | Description |
|---|---|---|---|
| string | mpiMode | mpi | The mode to communicate with the worker ranks. mpi will assume you are launching the application and workers in the same mpi command (or split launch command). mpi is the only supported mode |
| uint | maxCommandBufferEntries | 8192 | Set the max number of commands to buffer before submitting the command buffer to the workers |
| uint | commandBufferSize | 512 MiB | Set the max command buffer size to allow. Units are in MiB. Max size is 1.8 GiB |
| uint | maxInlineDataSize | 32 MiB | Set the max size of an OSPData which can be inline’d into the command buffer instead of being sent separately. Max size is half the commandBufferSize. Units are in MiB |
Parameters specific to the mpiOffload device.
The maxCommandBufferEntries, commandBufferSize, and
maxInlineDataSize can also be set via the environment variables:
OSPRAY_MPI_MAX_COMMAND_BUFFER_ENTRIES,
OSPRAY_MPI_COMMAND_BUFFER_SIZE, and OSPRAY_MPI_MAX_INLINE_DATA_SIZE,
respectively.
The mpiOffload device uses a dynamic load balancer by default. If you
wish to use a static load balancer you can do so by setting the
OSPRAY_STATIC_BALANCER environment variable to 1.
For the worker ranks to create GPU devices instead of the default CPU
devices set the environment variable OSPRAY_MPI_DISTRIBUTED_GPU, e.g.,
export OSPRAY_MPI_DISTRIBUTED_GPU=1or
mpiexec -genv OSPRAY_MPI_DISTRIBUTED_GPU 1 \
-n 1 ./ospExamples --osp:load-modules=mpi_offload --osp:device=mpiOffload \
: -n 2 ./ospray_mpi_workerThe mpiOffload device does not support multiple init/shutdown cycles.
Thus, to run ospBenchmark for this device make sure to exclude the
init/shutdown test by passing --benchmark_filter=-ospInit_ospShutdown
through the command line.
While MPI Offload rendering is used to transparently distribute
rendering work without requiring modification to the application, MPI
Distributed rendering is targeted at use of OSPRay within MPI-parallel
applications. The MPI distributed device can be selected by loading the
mpi_distributed_cpu module for CPU rendering or mpi_distributed_gpu
for GPU rendering, and manually creating and using an instance of the
mpiDistributed device, for example:
ospLoadModule("mpi_distributed_cpu");
OSPDevice mpiDevice = ospNewDevice("mpiDistributed");
ospDeviceCommit(mpiDevice);
ospSetCurrentDevice(mpiDevice);Your application can either initialize MPI before-hand, ensuring that
MPI_THREAD_SERIALIZED or higher is supported, or allow the device to
initialize MPI on commit. Thread multiple support is required if your
application will make MPI calls while rendering asynchronously with
OSPRay. When using the distributed device each rank can specify
independent local data using the OSPRay API, as if rendering locally.
However, when calling ospRenderFrameAsync the ranks will work
collectively to render the data. The distributed device supports both
image-parallel, where the data is replicated, and data-parallel, where
the data is distributed, rendering modes. The mpiDistributed device
will by default use each rank in MPI_COMM_WORLD as a render worker;
however, it can also take a specific MPI communicator to use as the
world communicator. Only those ranks in the specified communicator will
participate in rendering.
| Type | Name | Default | Description |
|---|---|---|---|
| void * | worldCommunicator | MPI_COMM_WORLD | The MPI communicator which the OSPRay workers should treat as their world |
Parameters specific to the mpiDistributed device.
| Type | Name | Default | Description |
|---|---|---|---|
| box3f[] | region | NULL | A list of bounding boxes which bound the owned local data to be rendered by the rank |
Parameters specific to the distributed OSPWorld.
| Type | Name | Default | Description |
|---|---|---|---|
| int | aoSamples | 0 | The number of AO samples to take per-pixel |
| float | aoDistance | 1020 | The AO ray length to use. Note that if the AO ray would have crossed a rank boundary and ghost geometry is not available, there will be visible artifacts in the shading |
| float | volumeSamplingRate | 1 | sampling rate for volumes |
Parameters specific to the mpiRaycast renderer.
If all ranks specify exactly the same data, the distributed device can
be used for image-parallel rendering. This works identical to the
offload device, except that the MPI-aware application is able to load
data in parallel on each rank rather than loading on the master and
shipping data out to the workers. When a parallel file system is
available, this can improve data load times. Image-parallel rendering is
selected by specifying the same data on each rank, and using any of the
existing local renderers (e.g., scivis, pathtracer). See
ospMPIDistribTutorialReplicated
for an example.
The MPI Distributed device also supports data-parallel rendering with
sort-last compositing. Each rank can specify a different piece of data,
as long as the bounding boxes of each rank’s data are non-overlapping.
The rest of the scene setup is similar to local rendering; however, for
distributed rendering only the mpiRaycast renderer is supported. This
renderer implements a subset of the scivis rendering features which
are suitable for implementation in a distributed environment.
By default the aggregate bounding box of the instances in the local
world will be used as the bounds of that rank’s data. However, when
using ghost zones for volume interpolation, geometry or ambient
occlusion, each rank’s data can overlap. To clip these non-owned overlap
regions out a set of regions (the region parameter) can pass as a
parameter to the OSPWorld being rendered. Each rank can specify one or
more non-overlapping box3f’s which bound the portions of its local
data which it is responsible for rendering. See the
ospMPIDistribTutorialVolume
for an example.
Finally, the MPI distributed device also supports hybrid-parallel rendering, where multiple ranks can share a single piece of data. For each shared piece of data the rendering work will be assigned image-parallel among the ranks. Partially-shared regions are determined by finding those ranks specifying data with the same bounds (matching regions) and merging them. See the ospMPIDistribTutorialPartialRepl for an example.
Calling ospPick in the distributed device will find and return the
closest global object at the screen position on the rank that owns that
object. The other ranks will report no hit. Picking in the distributed
device takes into account data clipping applied through the regions
parameter to avoid picking ghost data.
The MPI Offload rendering mode trivially supports user modules, with the
caveat that attempting to share data directly with the application
(e.g., passing a void * or other tricks to the module) will not work
in a distributed environment. Instead, use the ospNewSharedData API to
share data from the application with OSPRay, which will in turn be
copied over the network to the workers.
The MPI Distributed device also supports user modules, as all that is required for compositing the distributed data are the bounds of each rank’s local data.
The multidevice module is an experimental OSPRay device type that renders images by delegating off pixel tiles to a number of internal delegate OSPRay devices.
If you wish to try it set the OSPRAY_NUM_SUBDEVICES environmental
variable to the number of subdevices you want to create and tell OSPRay
to both load the multidevice_cpu extension and create a multidevice
for rendering instead of the default CPU device.
One example in a bash like shell is as follows:
OSPRAY_NUM_SUBDEVICES=6 ./ospTutorial --osp:load-modules=multidevice_cpu --osp:device=multideviceNote that the multidevice currently does not support
OSPImageOperations for denoising nor tone mapping.
A minimal working example demonstrating how to use OSPRay can be found
at
apps/tutorials/ospTutorial.c9.
An example of building ospTutorial.c with CMake can be found in
apps/tutorials/ospTutorialFindospray/.
To build the tutorial on Linux, build it in a build directory with
gcc -std=c99 ../apps/ospTutorial/ospTutorial.c \
-I ../ospray/include -L . -lospray -Wl,-rpath,. -o ospTutorialOn Windows build it can be build manually in a “build_directory\$Configuration” directory with
cl ..\..\apps\ospTutorial\ospTutorial.c -I ..\..\ospray\include -I ..\.. ospray.libRunning ospTutorial will create two images of two triangles, rendered
with the Scientific Visualization renderer with full Ambient Occlusion.
The first image firstFrame.ppm shows the result after one call to
ospRenderFrame – jagged edges and noise in the shadow can be seen.
Calling ospRenderFrame multiple times enables progressive refinement,
resulting in antialiased edges and converged shadows, shown after ten
frames in the second image accumulatedFrames.ppm.
Apart from tutorials, OSPRay comes with a C++ app called
ospExamples
which is an elaborate easy-to-use tutorial, with a single interface to
try various OSPRay features. It is aimed at providing users with
multiple simple scenes composed of basic geometry types, lights, volumes
etc. to get started with OSPRay quickly.
ospExamples app runs a GLFWOSPRayWindow instance that manages
instances of the camera, framebuffer, renderer and other OSPRay objects
necessary to render an interactive scene. The scene is rendered on a
GLFW window with an imgui GUI controls panel for the user to
manipulate the scene at runtime.
The application is located in
apps/ospExamples/
directory and can be built with CMake. It can be run from the build
directory via:
./ospExamples <command-line-parameter>
The command line parameter is optional however.
ospExamples application with
default boxes scene.
Different scenes can be selected from the scenes dropdown and each
scene corresponds to an instance of a special detail::Builder struct.
Example builders are located in
apps/common/ospray_testing/builders/.
These builders provide a usage guide for the OSPRay scene hierarchy and
OSPRay API in the form of cpp wrappers. They instantiate and manage
objects for the specific scene like cpp::Geometry, cpp::Volume,
cpp::Light etc.
The detail::Builder base struct is mostly responsible for setting up
OSPRay world and objects common in all scenes (for example lighting
and ground plane), which can be conveniently overridden in the derived
builders.
This app comes with four renderer options: scivis,
pathtracer, ao and debug. The app provides some common rendering
controls like pixelSamples and other more specific to the renderer
type like aoSamples for the scivis and ao renderer or
maxPathLength for the pathtracer.
The sun-sky lighting can be used in a sample scene by enabling the
renderSunSky option of the pathtracer renderer. It allows the user
to change turbidity and sunDirection.
renderSunSky option.
A minimal working example demonstrating how to use OSPRay for rendering
distributed data can be found at
modules/mpi/tutorials/ospMPIDistribTutorial.c10.
The compilation process via CMake is the similar to
apps/tutorials/ospTutorialFindospray/,
with the addition of finding and linking MPI.
To build the tutorial on Linux, build it in a build directory with
mpicc -std=c99 ../modules/mpi/tutorials/ospMPIDistribTutorial.c \
-I ../ospray/include -L . -lospray -Wl,-rpath,. -o ospMPIDistribTutorialOn Windows build it can be build manually in a “build_directory\$Configuration” directory with
cl ..\..\modules\mpi\tutorials\ospMPIDistribTutorial.c -I ..\..\ospray\include -I ..\.. ospray.libThe MPI module does not need to be linked explicitly, as it is loaded as a module at runtime.
ospMPIDistribTutorial or C++ tutorial with 4
ranks.
ospMPIDistribTutorial or C++ tutorial with 4
ranks.
The spheres and volume distributed tutorials are built as part of the MPI tutorials when building OSPRay with the MPI module and tutorials enabled. These tutorials demonstrate using OSPRay to render distributed data sets where each rank owns some subregion of the data, and displaying the output in an interactive window. The domain is distributed in a grid among the processes, each of which will generate a subset of the data corresponding to its subdomain.
In ospMPIDistribTutorialSpheres, each process generates a set of
spheres within its assigned domain. The spheres are colored from dark to
light blue, where lighter colors correspond to higher ranks.
ospMPIDistribTutorialSpheres on 4 ranks.
In ospMPIDistribTutorialVolume, each process generates a subbrick of
volume data, which is colored by its rank.

ospMPIDistribTutorialVolume on 4 ranks.
The partially replicated MPI tutorial demonstrates how to use OSPRay’s distributed rendering capabilities to render data sets that are partially replicated among the processes. Each pair of ranks generates the same volume brick, allowing them to subdivide the rendering workload between themselves. For example, when run with two ranks, each will generate the same brick and be responsible for rendering half of the image tiles it projects to. When run with four ranks, the pairs of ranks 0,1 and 2,3 will generate the same data and divide the rendering workload for that data among themselves.
The image work subdivision happens automatically, based on which ranks specify the same bounding box for their data, as demonstrated in the tutorial.
The partially replicated distribution is useful to support load-balanced rendering of data sets that are too large to be fully replicated among the processes, but are small enough to be partially replicated among them.
The replicated MPI tutorial demonstrates how OSPRay’s distributed rendering capabilities can be used to render data sets that are fully replicated among the ranks with advanced illumination effects. In this case, although the processes are run MPI parallel, each rank specifies the exact same data. OSPRay’s MPI parallel renderer will detect that the data is replicated in this case and use the same image-parallel rendering algorithms employed in the MPI offload rendering configuration to render the data. This image-parallel rendering algorithm supports all rendering configurations that are used in local rendering, e.g., path tracing, to provide high-quality images.
The replicated MPI tutorial supports the same scenes and parameters as
the ospExamples app described above.
This mode can be useful when high-quality rendering is desired and it is possible to copy the entire data set on to each rank, or to accelerate loading of a large model by leveraging a parallel file system.
Footnotes
-
This file is usually in
${install_location}/[lib|lib64]/cmake/ospray-${version}/. If CMake does not find it automatically, then specify its location in variableospray_DIR(either an environment variable or CMake variable). ↩ -
The number of items to be copied is defined by the size of the source array. ↩
-
For consecutive memory addresses the x-index of the corresponding voxel changes the quickest. ↩
-
actually a parallelogram ↩
-
respectively $(127, 127, 255)$ for 8 bit textures and $(32767, 32767, 65535)$ for 16 bit textures ↩
-
including spheres, boxes, infinite planes, closed meshes, closed subdivisions and curves ↩
-
OSPBoundshas essentially the same layout as theOSP_BOX3FOSPDataType. ↩ -
If there are multiple ambient lights then their contribution is added. ↩
-
A C++ version that uses the C++ convenience wrappers of OSPRay’s C99 API via
include/ospray/ospray_cpp.his available atapps/tutorials/ospTutorial.cpp. ↩ -
A C++ version that uses the C++ convenience wrappers of OSPRay’s C99 API via
include/ospray/ospray_cpp.his available atmodules/mpi/tutorials/ospMPIDistribTutorial.cpp. ↩