{kind=link}
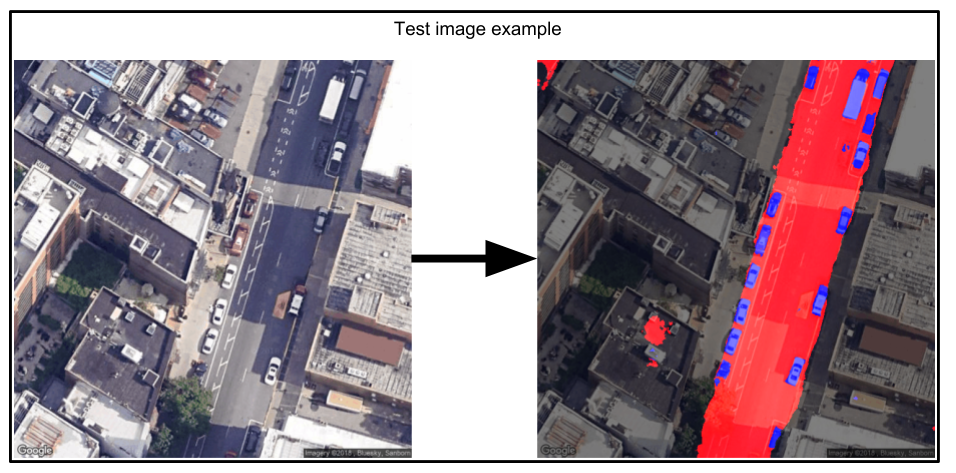
We aim to semantically segment a road and cars in an image by implementing a Fully Convolutional Network that is, given an image, we are able to predict which pixels of the image are roads and cars. We use 125 training images of satellite imagery from the Google Maps API and create the training masks manually. We also use transfer learning and VGGNet trained on a classification dataset to boost accuracy. Finally, we propose a simple way to identify the level of traffic in a certain image.
In the images below you can see the result of the project. Note that this is an image from the validation set. We are able to identify roads and cars very accurately with the method described.
Here you can find the paper with all the technical details of the project.
Here you can find the poster of the project.
Use
$ git clone https://github.com/clankster99/NN_project.git
to clone the project to your local machine.
You need to have Python. We recommend using Anaconda to install the project
The dependencies needed to run the project are shown here. You can use conda to install all of them.
$ conda install pillow
$ conda install numpy
To intall Pytorch
$ conda install pytorch
Alternatively, you can install the GPU version of pytorch
$ conda install pytorch-gpu
The rest of the dependicies should come by default.
roads_cars.py uses transfer learning from VGG16 to train whether to identify roads or cars. roads_cars.py is run using the following arguments:
'type': choices=['roads','cars'], help="Choose the type of model to train/load - either a model for cars or roads"
'-v', help="When passing v, a model will be loaded and validated using validation images. If this argument is not passed, then a new model will be trained and stored in the models folder."
'-p', help="Persist image."
'-s', help="Show image in a pop-up window."
no_pretrain_roads_cars.py uses an FCN architecure to train whether to identify only roads and trains it from scratch. This does not train a model to identify cars since the other approach works much better. no_pretrain_roads_cars.py is run using the following arguments:
'architecture', choices=['1','2'], help="Choose the architecture to use 1 is nearest neighbour upsampling and 2 is transposed convolution for the upsamplling procedure"
'-v', help="When passing v, a model will be loaded and validated using validation images. If this argument is not passed, then a new model will be trained and stored in the models folder."
'-p', help="Persist image."
'-s', help="Show image."
predict_traffic.py takes the pixels where they are predicted roads and the pixels where they are predicted cars and determines what percentage of the road is filled with cars to get the level of traffic.
- Carlos Daniel Mondragon Chapa
- Salar Satti
See list of contributors who participated in this project.
This project is licensed under the MIT License.