![]()
Package astar implements the A* search algorithm for finding least-cost paths.
In order to use the astar.FindPath function to find the least-cost path
between two nodes of a graph you need a graph data structure that implements
the Neighbours method to satisfy the astar.Graph[Node] interface and a
cost function. It is up to you how the graph is internally implemented.
In this example the graph is represented by a slice of strings, each character
representing a cell of a floor plan. Graph nodes are cell positions
as image.Point values, with (0, 0) in the upper left corner.
Spaces represent free cells available for walking, other characters like
# represent walls.
The Neighbours method returns the positions of the adjacent free cells
to the north, east, south, and west of a given position (diagonal movement
is not allowed in this example).
The cost function nodeDist simply calculates the Euclidean distance
between two cell positions.
package main
import (
"fmt"
"image"
"iter"
"math"
"github.com/fzipp/astar"
)
func main() {
maze := floorPlan{
"###############",
"# # # # #",
"# ### ### ### #",
"# # # # # #",
"### # # # ### #",
"# # # #",
"# # ### ### ###",
"# # # # # #",
"### # # # # ###",
"# # # # #",
"# # ######### #",
"# # #",
"# ### # # ### #",
"# # # # #",
"###############",
}
start := image.Pt(1, 13) // Bottom left corner
dest := image.Pt(13, 1) // Top right corner
// Find the shortest path
path := astar.FindPath[image.Point](maze, start, dest, nodeDist, nodeDist)
// Mark the path with dots before printing
for _, p := range path {
maze.put(p, '.')
}
maze.print()
}
// nodeDist is our cost function. We use points as nodes, so we
// calculate their Euclidean distance.
func nodeDist(p, q image.Point) float64 {
d := q.Sub(p)
return math.Sqrt(float64(d.X*d.X + d.Y*d.Y))
}
type floorPlan []string
var offsets = [...]image.Point{
image.Pt(0, -1), // North
image.Pt(1, 0), // East
image.Pt(0, 1), // South
image.Pt(-1, 0), // West
}
// Neighbours implements the astar.Graph[Node] interface (with Node = image.Point).
func (f floorPlan) Neighbours(p image.Point) iter.Seq[image.Point] {
return func(yield func(image.Point) bool) {
for _, off := range offsets {
q := p.Add(off)
if f.isFreeAt(q) {
if !yield(q) {
return
}
}
}
}
}
func (f floorPlan) isFreeAt(p image.Point) bool {
return f.isInBounds(p) && f[p.Y][p.X] == ' '
}
func (f floorPlan) isInBounds(p image.Point) bool {
return (0 <= p.X && p.X < len(f[p.Y])) && (0 <= p.Y && p.Y < len(f))
}
func (f floorPlan) put(p image.Point, c rune) {
f[p.Y] = f[p.Y][:p.X] + string(c) + f[p.Y][p.X+1:]
}
func (f floorPlan) print() {
for _, row := range f {
fmt.Println(row)
}
}Output:
###############
# # # #.#
# ### ### ###.#
# # # # #.#
### # # # ###.#
# # # .......#
# # ###.### ###
# # #.# # #
### # #.# # ###
# #..... # # #
# #.######### #
#... # #
#.### # # ### #
#. # # # #
###############
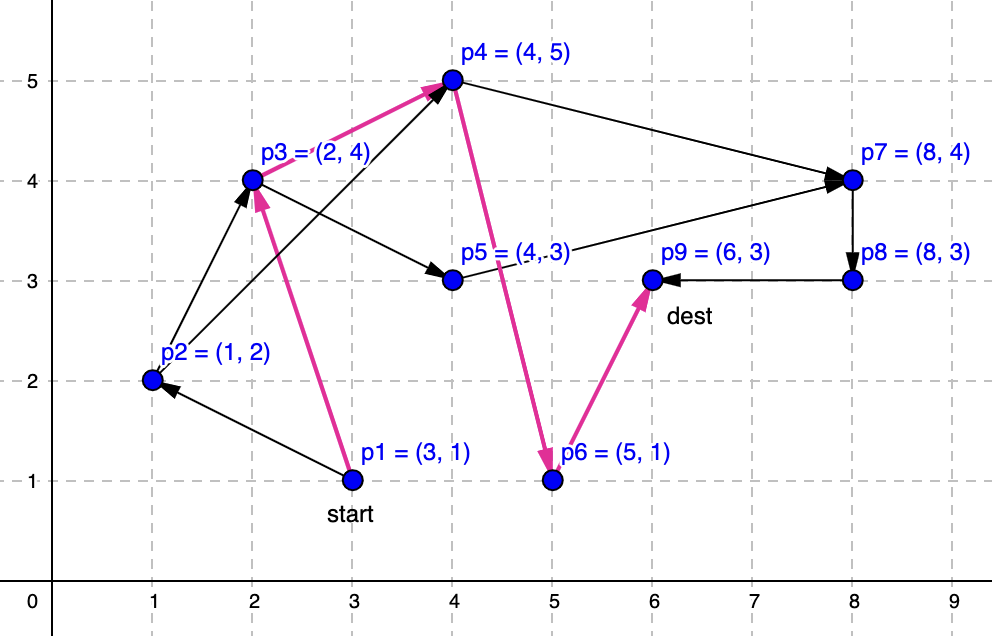
In this example the graph is represented by an adjacency list. Nodes are
2D points in Euclidean space as image.Point values. The link function
creates a bi-directed edge between a pair of nodes.
The cost function nodeDist calculates the Euclidean distance
between two points (nodes).
package main
import (
"fmt"
"image"
"iter"
"math"
"slices"
"github.com/fzipp/astar"
)
func main() {
// Create a graph with 2D points as nodes
p1 := image.Pt(3, 1)
p2 := image.Pt(1, 2)
p3 := image.Pt(2, 4)
p4 := image.Pt(4, 5)
p5 := image.Pt(4, 3)
p6 := image.Pt(5, 1)
p7 := image.Pt(8, 4)
p8 := image.Pt(8, 3)
p9 := image.Pt(6, 3)
g := newGraph[image.Point]().
link(p1, p2).link(p1, p3).
link(p2, p3).link(p2, p4).
link(p3, p4).link(p3, p5).
link(p4, p6).link(p4, p7).
link(p5, p7).
link(p6, p9).
link(p7, p8).
link(p8, p9)
// Find the shortest path from p1 to p9
p := astar.FindPath[image.Point](g, p1, p9, nodeDist, nodeDist)
// Output the result
if p == nil {
fmt.Println("No path found.")
return
}
for i, n := range p {
fmt.Printf("%d: %s\n", i, n)
}
}
// nodeDist is our cost function. We use points as nodes, so we
// calculate their Euclidean distance.
func nodeDist(p, q image.Point) float64 {
d := q.Sub(p)
return math.Sqrt(float64(d.X*d.X + d.Y*d.Y))
}
// graph is represented by an adjacency list.
type graph[Node comparable] map[Node][]Node
func newGraph[Node comparable]() graph[Node] {
return make(map[Node][]Node)
}
// link creates a bi-directed edge between nodes a and b.
func (g graph[Node]) link(a, b Node) graph[Node] {
g[a] = append(g[a], b)
g[b] = append(g[b], a)
return g
}
// Neighbours returns the neighbour nodes of node n in the graph.
func (g graph[Node]) Neighbours(n Node) iter.Seq[Node] {
return slices.Values(g[n])
}Output:
0: (3,1)
1: (2,4)
2: (4,5)
3: (5,1)
4: (6,3)
This project is free and open source software licensed under the BSD 3-Clause License.