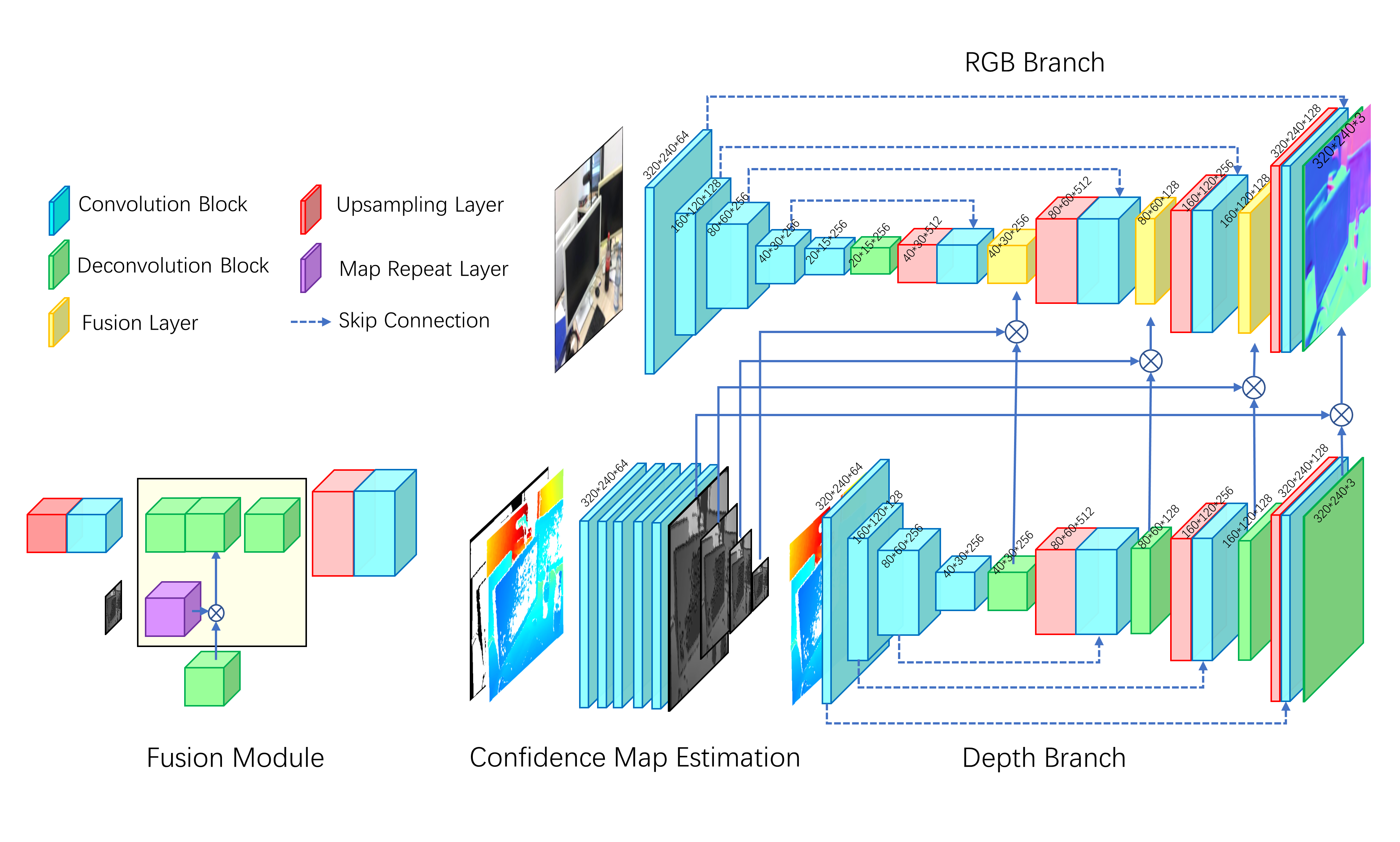
Deep Surface Normal Estimation with Hierarchical RGB-D Fusion (CVPR2019) [Project page]
|-- models: model structures
|-- pre_trained: pretrain models
|-- loader: dataloaders
|-- datalist: train/test list for matterport and scannet
testsmall: used for fast checking
|-- checkpoint/
FCONV_MS: RGBD model for
|-- matterport (fconv_ms_matterport_l1_2_hybrid_best.pkl)
|-- scannet (fconv_ms_scannet_l1_1_hybrid_best.pkl)
RGB_resume: RGB model for
|-- matterport (vgg_16_in_matterport_l1_2_in_RGB_best.pkl)
|-- scannet (vgg_16_in_scannet_l1_2_resume_RGB_best.pkl)
|-- sample_bash: bash sample for training and testing
|-- demo_rgbd_mp.sh/demo_rgbd_sc.sh , demo script
|-- sample_pic: sample pictures for demo
|-- train_RGB.py, training for RGB model
|-- test_RGB.py, testing for RGB model
|-- train_RGBD_ms.py, training for RGBD model
|-- test_RGBD_ms.py, testing for RGBD model
|-- test_RGBD_ms_sc.py, testing for RGBD model for object details
|-- config.json, config file for dataset filepath.
|-- utils.py, misc
Note: due to upload size limit, pretrain model and checkpoint are not uploaded. Please refer to Model section for model download.
- python 2.7
- torch 0.4.1
- torchvision 0.2.1
- scikit-learn 0.20.3
- numpy
- matplotlib
- tqdm
- tensorboardX
Two datasets are used: Matterport and Scannet. Please refer to [this website] for data download.
After data download, please config the data path in config.json.
Download the model and pretrain file from [Google Drive]
- Please set up environment and download the model.
- run demo_rgbd_mp.sh. Result will be saved in ./result/demo_rgbd_mp/
- run demo_rgbd_sc.sh. Result will be saved in ./result/demo_rgbd_sc/
Please set the data path in config.json
Sample bash files can be found in ./sample_bash for training and testing. You may use them directly or follow the below instruction to make your own training/testing scripts.
To train/test on matterport,
-
training:
- a. train RGB model with l1 loss (train_RGB.py)
- b. train fusion network with map_conv (no hybrid, just l1 at final scale) use RGB model for RGB encoder several epoch will be okay (5~10)
- c. use the model above as pretrained model, apply hybrid (5~10)
-
testing: run test_RGBD.py
func eval_normal_pixel for evaluation metric computation
Metric result saved in ./model_path/model_name.csv, as the below sequence:Mean error|Median error|Percentage of error less than 11.25°|22.5°|30°
The average result is stored in the last row. For metric detail meaning, please refer to paper
To train/test on scannet
-
training:
- a. train RGB model with l1 loss (train_RGB.py)
- b. train fusion network with map_conv (train_RGBD_ms.py, no hybrid, just l1 at final scale) use RGB model for RGB encoder several epoch will be okay (5~10)
- c. use the model above as pretrained model, apply hybrid(train_RGBD_ms.py,5~10 epoch)
-
testing: run test_RGBD_ms.py
func eval_normal_pixel for evaluation metric computation
Average metric result saved in ./model_path/model_name.csv -
Additionally, run test_RGBD_ms_sc.py
For object detail normal computation. Pixels belonging to bed, sofa, chair are computed separately
@inproceedings{zeng2019deep,
title={Deep Surface Normal Estimation with Hierarchical RGB-D Fusion},
author={Zeng, Jin and Tong, Yanfeng and Huang, Yunmu and Yan, Qiong and Sun, Wenxiu and Chen, Jing and Wang, Yongtian},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2019}
}
Jin Zeng, jzeng2010@gmail.com
Yunmu Huang, hymlearn@gmail.com