node-moving-things-tracker is a javascript implementation of a "tracker by detections" for realtime multiple object tracking (MOT) in node.js / browsers.
Commissioned by moovel lab for Beat the Traffic X and the Open Data Cam project.
How to track persistently multiple moving things from frame-by-frame object detections inputs? How to assign an unique identifier to frame-by-frame object detection results?
Often object detection framework don't have any memory of their detection results over time e.g. Yolo provides every frame an array of detections results in the form of [[x,y,w,h,confidence,name] ...], note that there isn't any unique ID to indentify the same detected object in future frames.
Detections Input
Raw Yolo detection results

Tracker Output
Yolo detection results enhanced with unique IDs after beeing processed by node-moving-things-tracker. Note that now every object has been assigned an unique ID

# Install globaly to use as command line tool
npm install -g node-moving-things-tracker
# Install localy your node.js / javascript project
npm install --save node-moving-things-tracker As a node module
const Tracker = require('node-moving-things-tracker').Tracker;
Tracker.updateTrackedItemsWithNewFrame(detectionScaledOfThisFrame, currentFrame);
const trackerDataForThisFrame = Tracker.getJSONOfTrackedItems();Example: Opendatacam.js of the Open Data Cam project.
Command line usage
node-moving-things-tracker takes as an input a txt file generated by node-yolo and outputs a tracker.json file that assigns unique IDs to the YOLO detections bbox.
The detections entry file could also be generated by another object detection algorithm than YOLO, it just needs to respects the same format.
NOTE : usage is customized for the use case of Beat the Traffic X
node-moving-things-tracker --input PATH_TO_YOLO_DETECTIONS.txt
# This will output a tracker.json file in the same folder containing the tracker dataSee example here:
Coordinate space:
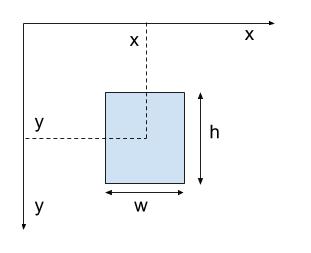
Detections Input
rawdetections.txt
{"frame":0,"detections":[{"x":699,"y":99,"w":32,"h":19,"confidence":34,"name":"car"},{"x":285,"y":170,"w":40,"h":32,"confidence":26,"name":"car"},{"x":259,"y":178,"w":75,"h":46,"confidence":42,"name":"car"},{"x":39,"y":222,"w":91,"h":52,"confidence":61,"name":"car"},{"x":148,"y":199,"w":123,"h":55,"confidence":53,"name":"car"}]}
{"frame":1,"detections":[{"x":699,"y":99,"w":32,"h":19,"confidence":31,"name":"car"},{"x":694,"y":116,"w":34,"h":23,"confidence":25,"name":"car"},{"x":285,"y":170,"w":40,"h":32,"confidence":27,"name":"car"},{"x":259,"y":178,"w":75,"h":46,"confidence":42,"name":"car"},{"x":39,"y":222,"w":91,"h":52,"confidence":61,"name":"car"},{"x":148,"y":199,"w":123,"h":55,"confidence":52,"name":"car"}]}Tracker Output
Normal mode:
{
// Tracker data for each frame
"43": [
{
"id": 0,
"x": 628,
"y": 144,
"w": 48,
"h": 29,
"confidence": 80,
"name": "car",
"isZombie": false
},
{
"id": 1,
"x": 620,
"y": 154,
"w": 50,
"h": 35,
"confidence": 80,
"name": "car",
"isZombie": true
}
]
}Debug mode:
#Run with ---debug flag at the end
node-moving-things-tracker --debug --input PATH_TO_YOLO_DETECTIONS.txt{
// Tracker data for each frame
"43": [
{
"id": "900e36a2-cbc7-427c-83a9-819d072391f0",
"idDisplay": 0,
"x": 628,
"y": 144,
"w": 48,
"h": 29,
"confidence": 80,
"name": "car",
"isZombie": false,
"zombieOpacity": 1,
"appearFrame": 35,
"disappearFrame": null
},
{
"id": "38939c38-c977-40a9-ad6a-3bb916c37fa1",
"idDisplay": 1,
"x": 620,
"y": 154,
"w": 50,
"h": 35,
"confidence": 80,
"name": "car",
"isZombie": false,
"zombieOpacity": 1,
"appearFrame": 43,
"disappearFrame": null
}
]
}Usage with opendatacam/darknet (opendatacam/darknet#2) generated tracker data
node-moving-things-tracker --mode opendatacam-darknet --input detectionsFromDarknet.json
# This will output a tracker.json file in the same folder containing the tracker data
# Output format is the same as previouslyExample detections.json file
[
{
"frame_id":0,
"objects": [
{"class_id":5, "name":"bus", "relative_coordinates":{"center_x":0.394363, "center_y":0.277938, "width":0.032596, "height":0.106158}, "confidence":0.414157},
{"class_id":5, "name":"bus", "relative_coordinates":{"center_x":0.363555, "center_y":0.285264, "width":0.062474, "height":0.133008}, "confidence":0.402736}
]
},
{
"frame_id":0,
"objects": [
{"class_id":5, "name":"bus", "relative_coordinates":{"center_x":0.394363, "center_y":0.277938, "width":0.032596, "height":0.106158}, "confidence":0.414157},
{"class_id":5, "name":"bus", "relative_coordinates":{"center_x":0.363555, "center_y":0.285264, "width":0.062474, "height":0.133008}, "confidence":0.402736}
]
}
]node-moving-things-tracker --mode motchallenge --input PATH_TO_MOT_DETECTIONS.txt
# Output will be in the same folder as input under the name outputTrackerMOT.txtHow to benchmark against MOT Challenge : https://github.com/opendatacam/node-moving-things-tracker/blob/master/documentation/BENCHMARK.md
No params tweaking is possible via command-line for now, it is currently optimized for tracking cars in traffic videos.
Based on V-IOU tracker: https://github.com/bochinski/iou-tracker/ , paper: http://elvera.nue.tu-berlin.de/files/1547Bochinski2018.pdf
In order to define if an object is the same from one frame to another, we compare the overlapping areas between the two detections between the frames.
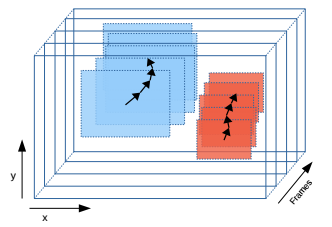
By computing the intersection over union:
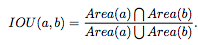
On top of this we added some prediction mecanism for next frame based on velocity / acceleration vector to avoid ID reassignment when the object is missed only for a few frames.
node-moving-things-tracker is based on the ideas and work of the following people. References are listed chronologicaly how we encounter them.
- OpenCV Matching Faces Over Time by Daniel Shiffman
- Filter for interupting values related thread in the VVVV forum with source code and approaches. Pointer via Joreg
- IOU Tracker by Erik Bochinski, Volker Eiselein and Thomas Sikora, based on this paper.
- SORT Tracker by Alex Bewley, based on this paper.