This ROS node enables a robot equipped with the Orbbec Astra Pro RGB-D camera to follow a human and to re-identify the target by applying a extrapolation of the target's last known position based on the CTRA motion model.
- Laptop running ROS Kinetic on Ubuntu 16.04 LTS
- Orbbec Astra Pro camera
- Turtlebot 2
In order for the Turtlebot 2 to work with ROS, a few packages have to be installed first.
sudo apt-get install ros-kinetic-turtlebot ros-kinetic-turtlebot-apps ros-kinetic-turtlebot-interactions ros-kinetic-turtlebot-simulator ros-kinetic-kobuki-ftdi ros-kinetic-ar-track-alvar-msgs
You maybe already have CMake on your machine. If you don't have it, you need to download it from their homepage at https://cmake.org/download/. After downloading, create a new directory and paste the downloaded file in this directory and unzip it.
mkdir programs
cd programs/cmake-<your_version>
To install CMake run the following command (this can take a few minutes):
sudo ./bootstrap && make && make install
Download the Orbbec OpenNI SDK from the following site: https://orbbec3d.com/develop/. Copy this zip file to the programs directory you've made with the installation of CMake. Unzip the file in this directory. Go to:
cd programs/OpenNI_<your_version>/Linux
Here unzip the OpenNI-Linux-x64-2.3 folder and run the following commands:
cd OpenNI-Linux-x64-2.3
chmod +x install.sh
sudo ./install.sh
Plug in your camera and run the command:
source OpenNIDevEnvironment
Before you can test visual samples, you need the freeglut3 header and libraries, so install them using the following
commands:
sudo apt install build-essential freeglut3 freeglut3-dev
Since now freeglut3 is installed, build a sample and try if it works:
cd Samples/SimpleViewer
make
cd Bin/x64-Release
./SimpleViewer
Download the Orbbec Astra SDK zip file for your machine from the the Orbbec site: https://orbbec3d.com/develop/.
Copy this zip file to the directory /programs which you have made with the installation of CMake and unzip the file.
Rename the unzipped folder to Astra_SDK for easier navigation through the folders. Go to and run:
cd programs/Astra_SDK/install
chmod +x install.sh
sudo ./install.sh
To test if the Astra SDK is installed properly, you need to have the SFML libraries. (more information can be found at their homepage at https://www.sfml-dev.org/):
sudo apt install libsfml-dev
Test the software with the following commands:
cd ..
cd bin
./SimpleBodyViewer-SFML
If the program is installed correctly, a new window pops up which recognizes a human and draws a skeleton in the picture as shown below.
In order to install the message type for the astra_body_tracker package, use the following commands:
cd <your_catkin_workspace>/src
git clone https://github.com/shinselrobots/body_tracker_msgs.git
cd .. && catkin_make
Next, the astra_body_tracker package has to be installed. To clone the repository, use the following commands:
cd <your_catkin_workspace>/src
git clone https://github.com/KrisPiters/astra_body_tracker.git
Before running catkin_make, make sure the path to the Astra SDK in the CMakeLists.txt is updated to the path to your
Astra_SDK. To do that, open the CMakeLists.txt and change the paths at line 19 - 22 to the path to your Astra_SDK
directory:
cd astra_body_tracker
nano CMakeLists.txt
When changed, build the package:
cd ../.. && catkin_make
For the last part, now you need to install this package. Go to the source of your catkin workspace and clone this repository:
cd <your_catkin_workspace>/src
git clone https://github.com/sijanz/robust_people_follower
cd .. && catkin_make
Even though this ROS node works perfectly fine when running locally on the laptop connected to the Turtlebot 2, in order to view markers in RViz that are published by this node, you have to enable networking on the Turtlebot.
To set up the network configuration, follow this tutorial: http://wiki.ros.org/turtlebot/Tutorials/indigo/Network%20Configuration
If the camera and the Kobuki base are both connected to your laptop running ROS, execute the following command to start the Turtlebot:
roslaunch turtlebot_bringup minimal.launch
After that, use the following command to start this node:
roslaunch robust_people_follower robust_people_follower.launch
After startup, the robot automatically is in a passive WAITING mode. In order to select yourself as the target, perform the following gesture: Close both of your hands to fists and hold them above your shoulder. Hold this gesture for at least 3 seconds.

The robot is now following you. If the robot should loose the line of sight to you, it tries to re-identify you. If the re-identification is successful, the robot keep following you. If the robot fails to re-identify you, its mode is set to WAITING. In order de-select yourself as the target, perform the above mentioned gesture again during following.
This node publishes markers that can be viewed in RViz to get a visualization of the robot's surroundings. After networking on the Turtlebot 2 is configured, open RViz using the following command:
roslaunch turtlebot_rviz_launchers view_robot.launch
Then select the ROS topic robust_people_follower/markers to display the markers published by this node.
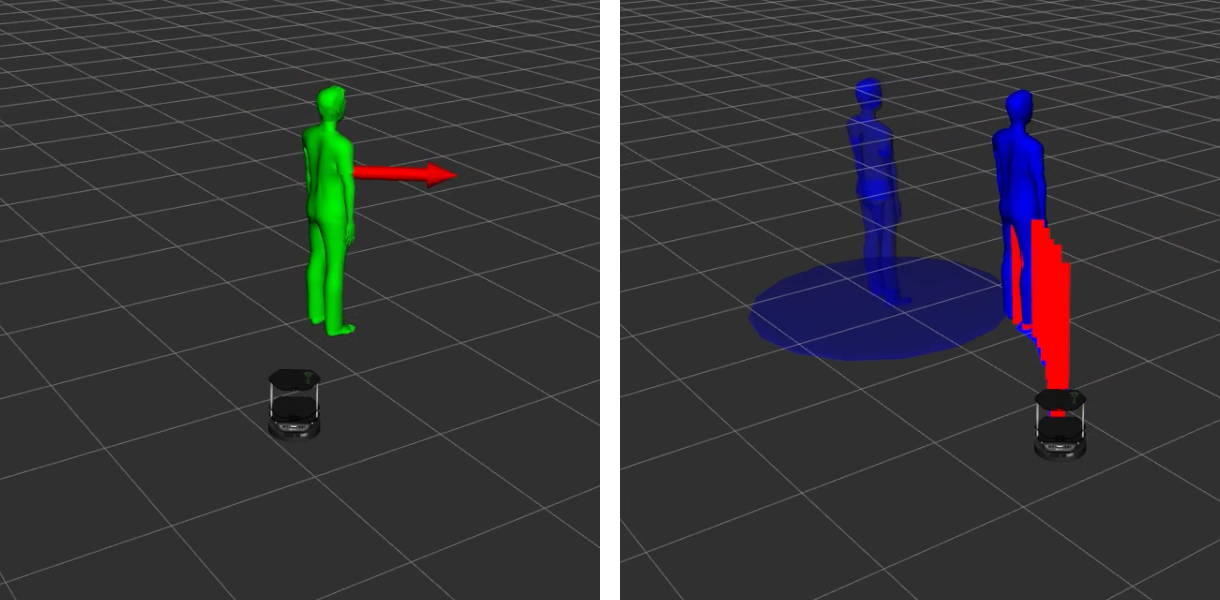
Markers published include:
- position of tracked persons (yellow marker in form of a human)
- position of the current target (green marker in form of a human)
- velocity vector of tracked persons (red arrow)
- waypoints of the robot (red column)
- replicated path (blue line in between waypoint markers)
- last known position of the target (solid blue marker in form of a person)
- extrapolated position of the target after target loss (semi-transparent blue person marker)
- probability radius in which the target is re-identified (semi-transparent blue circle)