Flight Monitor module of Ground Control Station for drones developed with Qt 5 on Windows 7
飞前监控
-
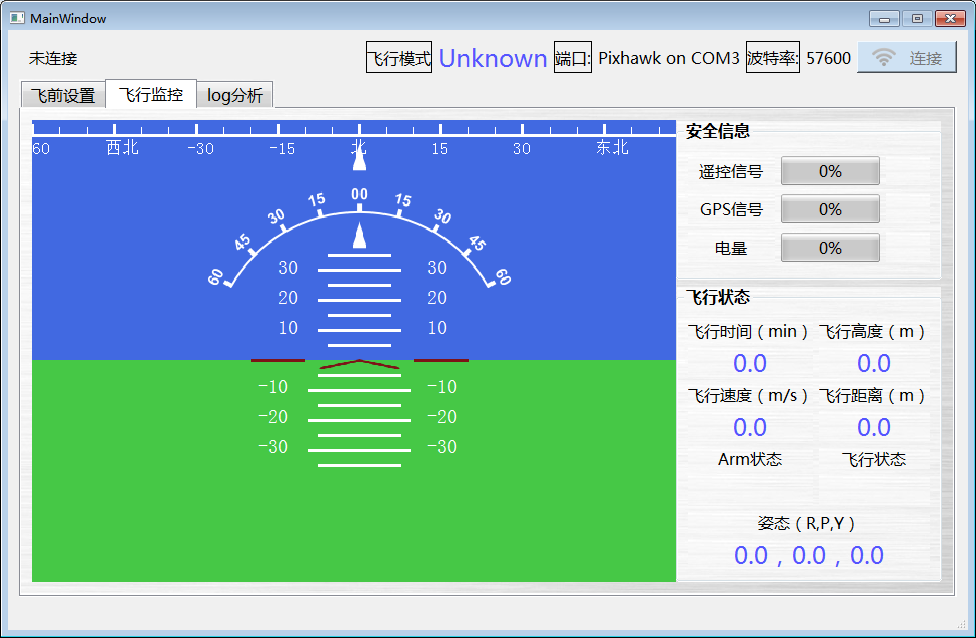
mainwindow:飞行监控主页面,显示
飞行信息 飞机的状态信息 飞行模式 连接状态 飞行姿态(roll/pitch/yaw) 遥控信号 飞行时间 GPS信号 飞行高度 电量(及低电量报警) 飞行速度 Arm状态 飞行距离 飞行状态 -
attitude_indicator:实时绘图显示飞行器姿态信息
-
audio_worker:语音报警功能
-
Vehilce:从收到的MAVLink消息包中解析出飞行信息和飞机的状态信息,发送给mainwindow进行显示
-
VehicleManager: 管理vehicle的创建和销毁
-
LinkManager:管理串口连接,从串口数据中读取完整的MAVLink消息包,转发给Vehicle进行进一步处理
-
SerialCommunication:串口收发线程
- 主页面点击“连接”按钮,在串口列表中搜寻到对应飞控,连接
- 飞控连接地面站后,持续发送固定的消息包(发送哪些消息包以及发送频率由飞控开发人员定义)
- 地面站通过串口线程持续地接收数据
- 接收到的数据交给LinkManager,提取出完整的MAVLink消息包
- 地面站通过Heartbeat(#0)心跳包监测飞控的连接状态
- LinkManager将MAVLink消息包转发给Vehicle,Vehicle提取所需的信息在主页面进行显示