H TF
ROS-ben (és álatalában robotikában) a transformok határozzák meg a hogy, mi merre található az adott vonatkozatási ponttól (frame).
Például a nissan leaf base_link framejéhez képest a következő fontosabb framek találhatóak meg:
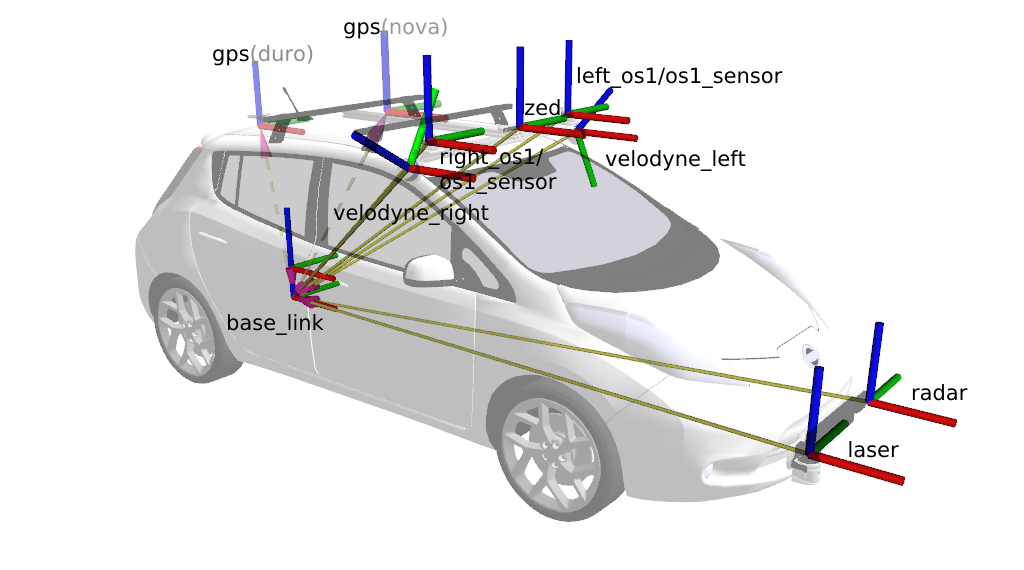 1. ábra - Frame-k a járművön
1. ábra - Frame-k a járművön
Szeretnénk tartani magunkat ahhoz a konvencióhoz, hogy a globális térképet map frame-nek, a jármű hátsó tengelyép base_link-nek hívjuk. A map és a base_link közötti megfeleltetés történehet GPS, NDT matching, Kálmán filter, odometria és számos további módon. Ezt a követező példa szemlélteti:
 2. ábra - Példa TF tree
2. ábra - Példa TF tree
GPS használata esetén nagyvonalakban a következő példa alapján kell elképzelni a frameket. A map a globális térkép, viszont a gps helyzetét is tudjuk ehhez képest. (Megjegyzés: a 2020.A senzor összeállításban 2 GPS is van, ezek kölönböző helyen találhatóak, mérni tudnak párhuzamosan, de csak egy transzform határozhatja meg a base_link helyzetét. Ezt az 1. ábrán a szaggatott nyilak jelzik.) Innen már egy további (statikus) transzformációval kapható a base_link (a hátsó tengely). További statikus transzformációkkal kaphatók a szenzorok a példában a left_os1/os1_sensor látható.
 3. ábra - A TF tree 2d koordinátarendszerben, vizuális példa
3. ábra - A TF tree 2d koordinátarendszerben, vizuális példa
A transformok a tf topicaban hirdetődnek, azonban például az MPC szabályzó egy current_pose nevű topicot használ a szabályzás megvalósításához. Ezt úgy oldottuk meg, hogy a base_link frame értékeit current_pose topic-ként is hirdetjük. A frame transzlációja a topic pozícója, illetve a frame rotációja a topic orientációja.
Nagy transzformoknál az RVIZ megjelenítője nem működik pontosan (https://github.com/ros-visualization/rviz/issues/502). Mivel az ROS SI mértékegységeket használ, így métert is, a GPS esetén célszerű az UTM (wikipedia-utm) koordinátarendszer használata. Ez értelemszerűen nagy értékű koorinátákkal számol. Ahhoz, hogy ezt az ellentmondástfeloldjuk célszerű kisebb traszformokat megjeleníteni. Így például Győrhöz (map_gyor_0) és Zalához (map_zala_0) egy fix statikus transformot, hirdetni, amihez képest már szépen működik az RVIZ megjelenítője. A következő ábra ezt szemlélteti, illetve egy kicsit részletesebb szenzorrendszert mutat be.
 4. ábra - Az
4. ábra - Az rqt_tf_tree által megjelenített TF fa
Az ábrán csak a map gps transzform változó, a többi statikus. Statikus transzformot hirdetni launch fájlban például a /base_link és a left_os1/os1_sensor következőképp lehet (lásd 3. ábra)
<node args="1.769 0.58 1.278 3.1415926535 0.0 0.0 /base_link left_os1/os1_sensor 50" name="ouster_left_tf_publisher" pkg="tf" type="static_transform_publisher"/>Vagy ugyanez parancsként (50 ms = 20 Hz):
rosrun tf static_transform_publisher 1.769 0.58 1.278 3.1415926535 0.0 0.0 /base_link left_os1/os1_sensor 50 Példa a statikus transzform launch fájlra: tf_nissanleaf_statictf.launch

