{kind=link}
Kinodynamic RRT Implementation
To install the Python package, navigate to this folder and do:
sudo python setup.py build && sudo python setup.py install
To install the ROS example package, first install the Python package and then copy the folder named lqrrt_ros (found in the lqRRT/demos folder) into the src folder of your catkin workspace. Finally, catkin_make.
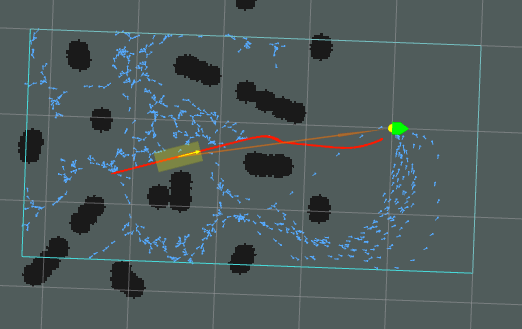
Feel free to take the lqrrt.rviz file out of that folder and put it in your home directory's .rviz folder. To run the ros demo: roslaunch lqrrt_ros lqrrt_sim.launch
Enjoy!
-Jason Nezvadovitz