Lua RTOS is a real-time operating system designed to run on embedded systems, with minimal requirements of FLASH and RAM memory. Currently Lua RTOS is available for ESP32, ESP8266 and PIC32MZ platforms, and can be easilly ported to other 32-bit platforms.
Lua RTOS has a 3-layer design:
- In the top layer there is a Lua 5.3.4 interpreter which offers to the programmer all the resources provided by the Lua programming language, plus special modules for access the hardware (PIO, ADC, I2C, RTC, etc …), and middleware services provided by Lua RTOS (Lua Threads, LoRa WAN, MQTT, …).
- In the middle layer there is a Real-Time micro-kernel, powered by FreeRTOS. This is the responsible for that things happen in the expected time.
- In the bottom layer there is a hardware abstraction layer, which talk directly with the platform hardware.
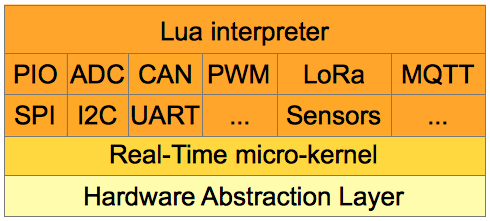
For porting Lua RTOS to other platforms is only necessary to write the code for the bottom layer, because the top and the middle layer are the same for all platforms.
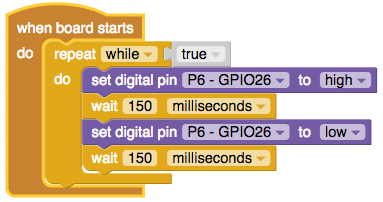
The Lua RTOS compatible boards can be programmed with The Whitecat IDE in two ways: using the Lua programming language directly, or using a block-based programming language that translates blocks to Lua. No matter if you use Lua or blocks, both forms of programming are made from the same programming environment. The programmer can decide, for example, to made a fast prototype using blocks, then change to Lua, and finally back to blocks.
The Whitecat IDE is available at: https://ide.whitecatboard.org.

In our wiki you have more information about this.
-
Please note you need probably to download and install drivers for your board's USB-TO-SERIAL adapter for Windows and Mac OSX versions. The GNU/Linux version usually doesn't need any drivers. This drivers are required for connect to your board through a serial port connection.
Board WHITECAT ESP32 N1 ESP32 CORE ESP32 THING -
For Linux, the currently logged user should have read and write access the sUSB-TO-SERIAL device. On most Linux distributions, this is done by adding the user to dialout group with the following command:
$ sudo usermod -a -G dialout $USER
-
Install The Whitecat Console. The Whitecat Console is a command line tool that allows the programmer to flash a Lua RTOS compatible board with the last available firmware.
-
Download The Whitecat Console binary for your platform.
-
Copy The Whitecat Console binary to a folder accessed by the system path. For example:
- Ubuntu: sudo cp wcc /usr/bin
- Mac OS: sudo cp wcc /usr/bin
- Windows: runas /noprofile /user:Administrator "copy wcc.exe c:\windows\system32"
-
Test that The Whitecat Console binary works well.
For Ubuntu / Mac OS open a terminal and type:
$ wcc wcc -p port | -ports [-ls path | [-down source destination] | [-up source destination] | [-f | -ffs] | [-erase] | -d] -ports: list all available serial ports on your computer -p port: serial port device, for example /dev/tty.SLAB_USBtoUART -ls path: list files present in path -down src dst: transfer the source file (board) to destination file (computer) -up src dst: transfer the source file (computer) to destination file (board) -f: flash board with last firmware -ffs: flash board with last filesystem -erase: erase flash board -d: show debug messages
For Windows open a "command" window and type wcc.exe
-
-
Find which serial device is used by your board.
Open a terminal with your board unplugged.
$ wcc -ports Available serial ports on your computer: /dev/cu.Bluetooth-Incoming-Port /dev/cu.Bluetooth-Modem
Now plug your board.
$ wcc -ports Available serial ports on your computer: /dev/cu.Bluetooth-Incoming-Port /dev/cu.Bluetooth-Modem /dev/cu.SLAB_USBtoUART
In the above example, board is using /dev/cu.SLAB_USBtoUART serial device. This device will be used in the following steps as parameter value -p.
For windows use wcc.exe instead of wcc.
-
Flash your board.
Open a terminal with your board plugged.
$ wcc -p /dev/cu.SLAB_USBtoUART -f
If you want to flash the default file system add the -ffs option.
$ wcc -p /dev/cu.SLAB_USBtoUART -f -ffs
If you are flashing the Lua RTOS firmware for first time you will get an error:
Unknown board model. Maybe your firmware is corrupted, or you haven't a valid Lua RTOS firmware installed. Do you want to install a valid firmware now [y/n])?
Enter "y" if you want to install a valid firmware:
Please, enter your board type: 1: WHITECAT N1 2: WHITECAT N1 WITH OTA 3: ESP32 CORE BOARD 4: ESP32 CORE BOARD WITH OTA 5: ESP32 THING 6: ESP32 THING WITH OTA 7: GENERIC 8: GENERIC WITH OTA Type:
Finally enter your board type and your board will be flashed.
For windows use wcc.exe instead of wcc.
To upgrade a board with a Lua RTOS firmware installed on it:
$ wcc -p /dev/cu.SLAB_USBtoUART -f
If you need to change the firmware type on a board with a Lua RTOS firmware installed on it, for example to change an OTA firmware to a non OTA firmware:
$ wcc -p /dev/cu.SLAB_USBtoUART -erase $ wcc -p /dev/cu.SLAB_USBtoUART -f
-
Install ESP32 toolchain for your desktop platform. Please, follow the instructions provided by ESPRESSIF:
-
Clone or pull esp-idf repository from ESPRESSIF:
If you are build Lua RTOS for first time, clone the esp-idf repository:
git clone --recursive https://github.com/espressif/esp-idf.git
otherwise, pull last esp-idf changes from your esp-idf folder:
git pull git submodule update --init --recursive
-
Clone or pull Lua RTOS repository:
If you are building Lua RTOS for first time, clone Lua RTOS repository:
git clone --recursive https://github.com/whitecatboard/Lua-RTOS-ESP32
otherwise, pull last Lua RTOS changes from your Lua Lua-RTOS-ESP32 folder:
git pull origin master
-
The installer works only with Python 2.
You can check your python version by running
python --versionIf your default python verision is 3.x.x then the most convenient way to switch is to install pyenv. Then install the latest python2, and activate the python2 version. Activating Python2 in the Lua-RTOS-ESP32 directory may be your best approach.
You may need to revert your pyparsing version using
pip install pyparsing==2.4.7which is the latest version that works with Python2.
-
Setup the build environment:
Go to Lua-RTOS-ESP32 folder:
cd Lua-RTOS-ESP32
Edit the env file and change PATH, IDF_PATH, LIBRARY_PATH, PKG_CONFIG_PATH, CPATH for fit to your installation locations.
Now do:
source ./env
-
Build:
$ make flash
If you are building Lua RTOS for first time, select your board type, and press enter:
Please, enter your board type: 1: Whitecat N1 ESP32 2: Whitecat N1 ESP32 with OTA 3: Whitecat N1 ESP32 DEVKIT 4: Whitecat N1 ESP32 DEVKIT with OTA 5: Espressif Systems ESP32-CoreBoard 6: Espressif Systems ESP32-CoreBoard with OTA 7: SparkFun ESP32 Thing 8: SparkFun ESP32 Thing with OTA Board type:
When the Lua RTOS build process finish, the board will be flashed. It is possible that for certain operating systems, or boards, the flashing process fails, due to a not compatible device name for your board's USB-TO-SERIAL adapter. In this case change the default configuration to met your board or operating system requirements, as described above.
-
Change the default configuration:
You can change the default configuration:
$ make menuconfig
Check the device name for your board's USB-TO-SERIAL adapter under the "Serial flasher config / Default serial port" category.
-
Build for other board:
If you have already build Lua RTOS previously and want to build for other board type:
$ make clean
Go to step 5.
You can connect to the Lua RTOS console using your favorite terminal emulator program, such as picocom, minicom, hyperterminal, putty, etc ... The connection parameters are:
- speed: 115200 bauds
- data bits: 8
- stop bits: 1
- parity: none
- terminal emulation: VT100
For example, if you use picocom:
picocom --baud 115200 /dev/tty.SLAB_USBtoUART /\ /\
/ \_____/ \
/_____________\
W H I T E C A T
Lua RTOS beta 0.1 build 1479953238 Copyright (C) 2015 - 2017 whitecatboard.org
cpu ESP32 at 240 Mhz
spiffs0 start address at 0x180000, size 512 Kb
spiffs0 mounted
spi2 at pins sdi=012/sdo=013/sck=014/cs=015
sd0 is at spi2, pin cs=015
sd0 type II, size 1943552 kbytes, speed 15 Mhz
sd0a partition type 0b, sector 227, size 1943438 kbytes
fat init file system
fat0 mounted
redirecting console messages to file system ...
Lua RTOS beta 0.1 powered by Lua 5.3.4
Executing /system.lua ...
Executing /autorun.lua ...
/ > Lua RTOS is free for you, but funds are required for make it possible. Feel free to donate as little or as much as you wish. Every donation is very much appreciated.
