- Teach your car how to drive by cloning your driving behavior
Keras+Tensorflow+OpenCV+ Nvidia model +Unity+AWS GPU EC2
Autonomous Driving | Full Video | Full Report

- The following image is a Nvidia model used by Nvidia to build behavior cloning neural networks
- This image provides the basic structure for
behaviorial cloningneural network used in this project with some tweaks such as the lastfully-connected layer - For more
installationdetails, please refer to installation.md file for more information

Sample Input Images with Steering Angle
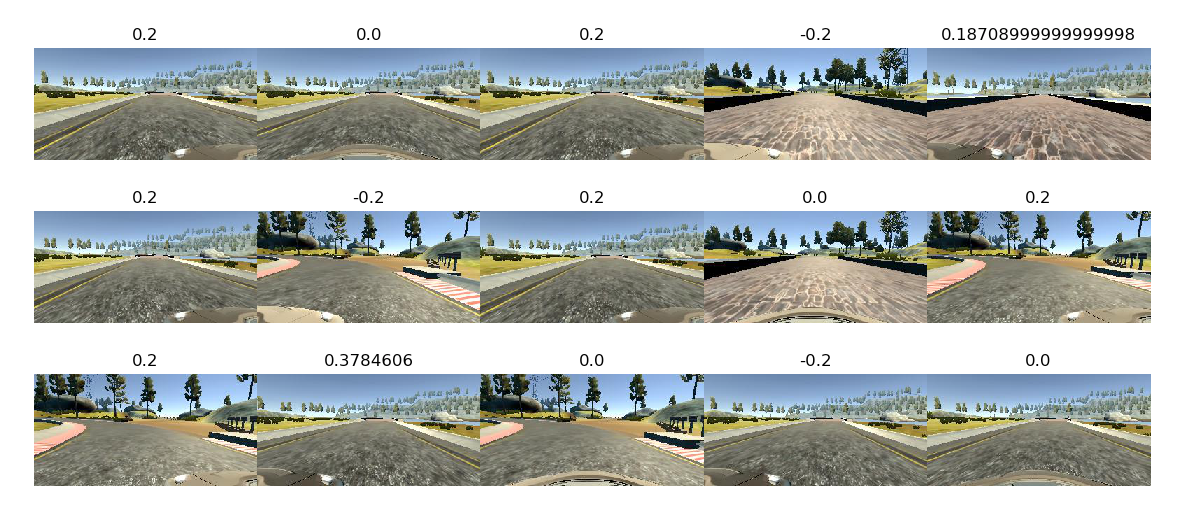
I used the following technique to pre-process input data for faster and more accurate learning
- Crop out car hood, sky, and trees (irrelevant to driving)
- Normalize images
- Apply steering correction of 0.2 on left and right cameras
- Flip images with curvature > 0.33 to augment data set
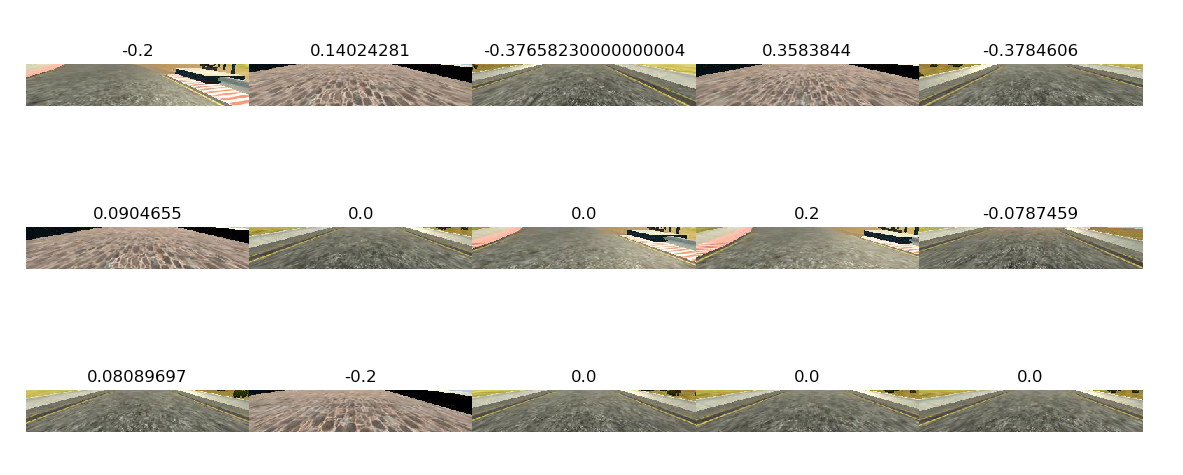
Pre processed Input Images with Steering Angle