This repository contains PyTorch implementation of FuseNet-SF5 architecture from the paper FuseNet: incorporating depth into semantic segmentation via fusion-based CNN architecture. Initial model's capability has been extended to perform joint scene classification and semantic segmentation. Potential effects of scene classification, as an auxiliary task, on overall semantic segmentation quality (and vice versa) are investigated within the scope of this project.
Other implementations of FuseNet: [Caffe] [PyTorch]

Prerequisites:
- python 3.6
- Nvidia GPU + CUDA cuDNN
Clone the repository and install the required packages:
git clone https://github.com/zanilzanzan/FuseNet_PyTorch.git
cd FuseNet_PyTorch
pip install -r requirements.txt- Simply, create a directory named datasets in the main project directory and in datasets directory download the preprocessed dataset, in HDF5 format, with 40 semantic-segmentation and 10 scene classes here: train + test set
- Preprocessed dataset contains 1449 (train: 795, test: 654) RGB-D images with 320x240 resolution, their semantic-segmentation and scene-type annotations.
- Depth image values have been normalized so that they fall into 0-255 range.
- Originally, NYU-Depth V2 dataset has 27 distinct scene types associated with the images. The number has been reduced to 10 classes (9 most common categories and the rest) based on the mapping Gupta et al. used. Scene mapping text file can be accessed here.
This section will be updated soon.
- To train FuseNet, run
fusenet_train.pyby providing the path of the dataset. - If you would like to train a FuseNet model with the classification head, provide
--use_class True - Example training commands can be found below.
w/o classification head:
python fusenet_train.py --dataroot ./datasets/nyu_class_10_db.h5 --batch_size 8 --lr 0.005w/ classification head:
python fusenet_train.py --dataroot ./datasets/nyu_class_10_db.h5 --batch_size 8 --lr 0.005 \
--num_epochs 200 --use_class True --name experiment_1w/o classification head:
python fusenet_train.py --dataroot ./datasets/nyu_class_10_db.h5 --resume_train True --batch_size 8 \
--load_checkpoint ./checkpoints/experiment/nyu/best_model.pth.tar --lr 0.01w classification head:
python fusenet_train.py --dataroot ./datasets/nyu_class_10_db.h5 --resume_train True --use_class True --batch_size 8 \
--load_checkpoint ./checkpoints/experiment/nyu/best_model_class_0_00040.pth.tar --lr 0.01 \
--lambda_class_range 0.004 0.01 5Note: When training a model that contains the classification head, by default the lambda value, which is the coefficient of the classification loss, is set to
0.001. In order to train the model for multiple sessions with multiple lambda values, following option should be added to the run command: --lambda_class_range start_value, end_value, steps_between. To train the model with only one session with one lambda value, set the start_value and the end_value the same, and the step_size to 1.
{kind=link}
- To evaluate FuseNet results, run
fusenet_test.py. Do not forget to include the 'class' word in the checkpoint file name when loading a model that contains the classification head. - Model's semantic segmentation performance on the given dataset will be evaluated in three accuracy measures: global pixel-wise classification accuracy, intersection over union, and mean accuracy.
- Example run command:
python fusenet_test.py --dataroot ./datasets/nyu_class_10_db.h5 --load_checkpoint ./checkpoints/nyu/best_model.pth.tarNote: To visualize the resulting images within the testing process, add --vis_results True option.
- Current semantic segmentation results on NYU V2 dataset:
| Models on NYU V2 | Global | IoU | Mean |
| FuseNet-SF5 (PyTorch) | 66.0 | 33.4 | 44.2 |
| FuseNet-SF5 (CAFFE) | 66.0 | 32.7 | 43.4 |
- Other pretrained FuseNet models will be uploaded soon.
- To plot the loss and accuracy history of a model, use
fusenet_plots.ipynbnotebook.
- To visualize segmentation predictions separately, run
fusenet_visualize.pyscript. Do not forget to include the 'class' word in the checkpoint file name when loading a model that contains the classification head. - Example run command:
python fusenet_visualize.py --dataroot ./datasets/nyu_class_10_db.h5 \
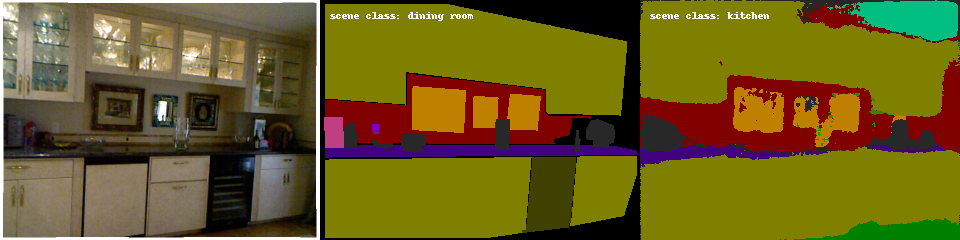
--load_checkpoint ./checkpoints/experiment/nyu/best_model_class_0_00010.pth.tar- Sample output images on NYU v2 (RGB - Ground Truth - Prediction):





Caner Hazirbas, Lingni Ma, Csaba Domokos and Daniel Cremers, "FuseNet: Incorporating Depth into Semantic Segmentation via Fusion-based CNN Architecture", in proceedings of the 13th Asian Conference on Computer Vision, 2016.
@inproceedings{fusenet2016accv,
author = "C. Hazirbas and L. Ma and C. Domokos and D. Cremers",
title = "FuseNet: incorporating depth into semantic segmentation via fusion-based CNN architecture",
booktitle = "Asian Conference on Computer Vision",
year = "2016",
month = "November",
}