SDK Examples Enhancements (part 1 on N) #3548
Merged
Conversation
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Fixing somewhat obscure bug that was causing D400 cameras connected to USB2 port to be mistakenly treated as USB3 (causing problems in various samples and tools). This was specific to Windows, and could occur when the camera was connected through anything but the first root hub.
Fixing USB2 detection bug
# Conflicts: # tools/enumerate-devices/rs-enumerate-devices.cpp
ev-mp
reviewed
Mar 20, 2019
examples/align/rs-align.cpp
Outdated
| // Using the pipeline's profile, we can retrieve the device that the pipeline uses | ||
| float depth_scale = get_depth_scale(profile.get_device()); | ||
| rs2::config cfg; | ||
| cfg.enable_stream(RS2_STREAM_DEPTH, 500, 500); |
examples/align/rs-align.cpp
Outdated
|
|
||
| //Render the vertical slider | ||
| // Render transparancy slider: |
examples/align/rs-align.cpp
Outdated
| return false; | ||
| } | ||
| ImGui::End(); | ||
| } |
There was a problem hiding this comment.
PLs add and empty line at EOL
examples/align-advanced/readme.md
Outdated
|
|
||
| These headers are part of the [ImGui](https://github.com/ocornut/imgui) library which we use to render GUI elements. | ||
|
|
||
| Next, we declare three functions to help the code look clearer: |
examples/hello-realsense/readme.md
Outdated
| // Try to get a frame of a depth image | ||
| rs2::depth_frame depth = frames.get_depth_frame(); | ||
| ``` | ||
| Next we query the default depth frame dimentions (these may differ from sensor to sensor): |
| rs2::frameset frames = p.wait_for_frames(); | ||
|
|
||
| // Try to get a frame of a depth image | ||
| rs2::depth_frame depth = frames.get_depth_frame(); |
There was a problem hiding this comment.
Pls check the return value to be on a safe side
| { | ||
| std::cerr << e.what() << std::endl; | ||
| return EXIT_FAILURE; | ||
| } |
| @@ -16,13 +16,9 @@ In this tutorial you will learn how to: | |||
|
|
|||
|
|
|||
| ## Expected Output | |||
|  | |||
|  | |||
There was a problem hiding this comment.
We can upload it to the public repo
| sensor.set_option(RS2_OPTION_VISUAL_PRESET, i); | ||
| // Set the device to High Accuracy preset | ||
| auto sensor = profile.get_device().first<rs2::depth_sensor>(); | ||
| sensor.set_option(RS2_OPTION_VISUAL_PRESET, RS2_RS400_VISUAL_PRESET_HIGH_ACCURACY); |
There was a problem hiding this comment.
Is this enum compatible with SR300 ?
# Conflicts: # examples/align/rs-align.cpp # examples/example.hpp # examples/measure/rs-measure.cpp
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
This pull-requests collects several quality of life improvements related to SDK examples:
Try it here
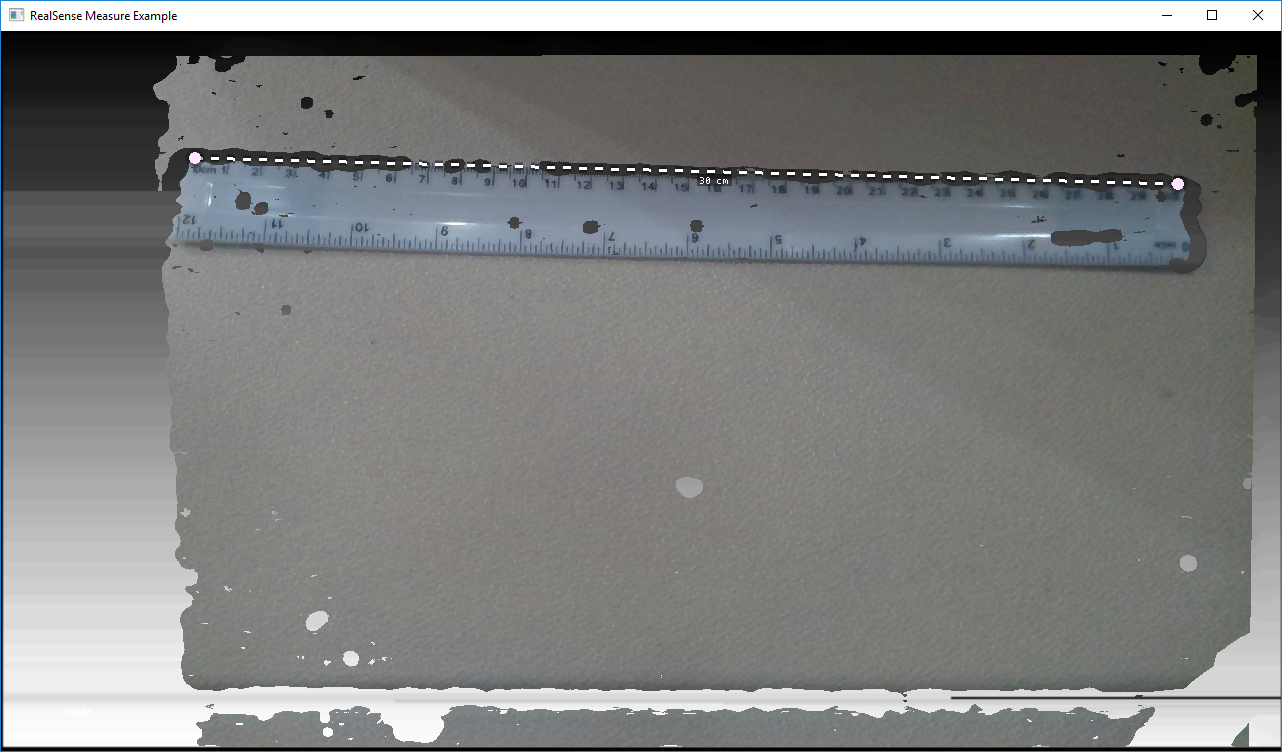
rs-hello-realsenseexample (code snippet from the main readme)rs-aligninto two separate examples - one introducing the concept of alignment, and the other showing an application of alignment (formerrs-align)rs-measure- removing shortest-path calculations and updating the code to use latest APIs:-doption tors-enumerate-devicesto print out default stream configurationCannot Resolve Requesterror message - now given invalid request, the SDK will suggest a list of possible alternatives: