ROSBAG Demo
This demo will need the given 3D map and ROSBAG sample data. Please download the following sample data before running the demo.
-
Download the sample 3D pointcloud/vector map data. [link]
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_data.tar.gz -
Download the sample data (LiDAR: VELODYNE HDL-32E, GNSS: JAVAD GPS RTK Delta 3) in ROSBAG format or ROSBAG2 format.
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.tar.gzMirroror
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.bag2.tar.gz
Once the demo goes well, you can visit ROSBAG STORE to get more data. Please also consider your contribution to this data sharing service by uploading your ROSBAG data.
- Autoware built from source: the demo
dataandrosbaghave been downloaded into the Downloads folder. - Autoware run from docker image: the demo
dataandrosbaghave been downloaded into theshared_dirfolder within the host.
-
Create the
.autowaredirectory and extract the demo data inside.From source:
$ cd ~ $ mkdir .autoware $ cd .autoware $ cp ~/Downloads/sample_moriyama_* . $ tar zxfv sample_moriyama_150324.tar.gz $ tar zxfv sample_moriyama_data.tar.gzUsing Docker:
$ cd ~ $ mkdir .autoware $ cd .autoware $ cp ~/shared_dir/sample_moriyama_* . $ tar zxfv sample_moriyama_150324.tar.gz $ tar zxfv sample_moriyama_data.tar.gz -
Run Autoware
For Autoware version 1.12.0 and Newer
$ cd autoware.ai $ source install/setup.bash $ roslaunch runtime_manager runtime_manager.launchFor Autoware version 1.11.0 and 1.11.1
$ cd autoware/ros $ source install/setup.bash $ ./runFor Autoware version 1.10.0 or older
$ cd autoware/ros $ source devel/setup.bash $ ./run -
Go to the
Simulationtab of Autoware Runtime Manager (ARM), and load the sample ROSBAG data, which is located in~/.autoware.Show Hidden Filesneeds to be checked for the.autowarefolder to be displayed.
-
Set the start time to
140, then clickPlayandPausejust after it has started playing.
-
Launch RViz through the
RVizbutton in the bottom-right corner of the ARM and load thedefault.rvizconfig provided with Autoware. To do this got toFile -> Open Configand navigate toautoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz.
-
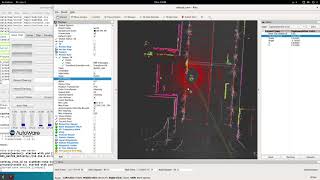
Go to the
Quick Starttab of ARM, and load the preinstalled roslaunch scripts one by one. The scripts are located inautoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/. The scripts need to be enabled by clicking on the left button as shown in the image for theMap.
-
Un-pausing the simulation after starting the
Mapwill show the pointcloud map in Rviz.
Please follow the instruction video below:
![]()