GettingStarted Sensors
<< Maps | Home | Simulation >>
Rmagine supports several configurations of commonly used range sensors as Spherical, Pinhole or even fully customizable O1Dn and OnDn models. The following image shows how the results could look like using these different models.
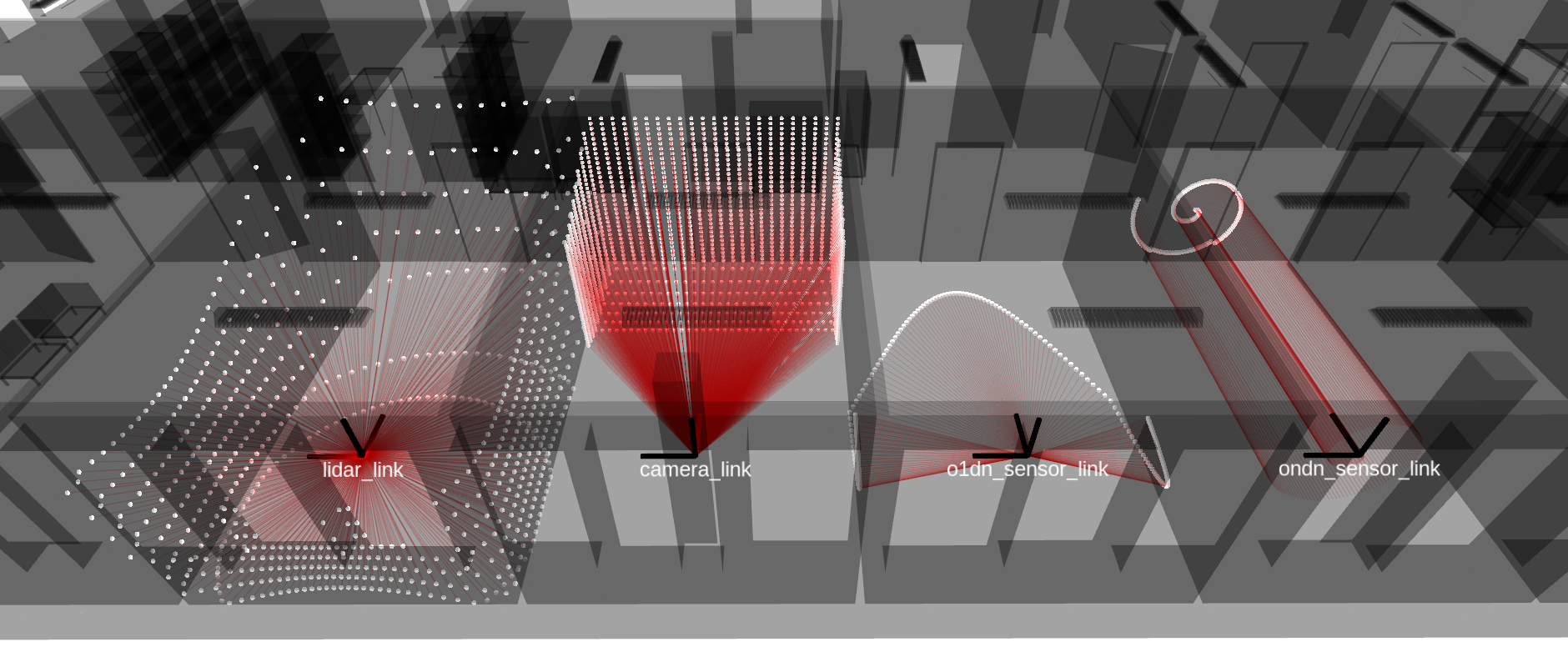
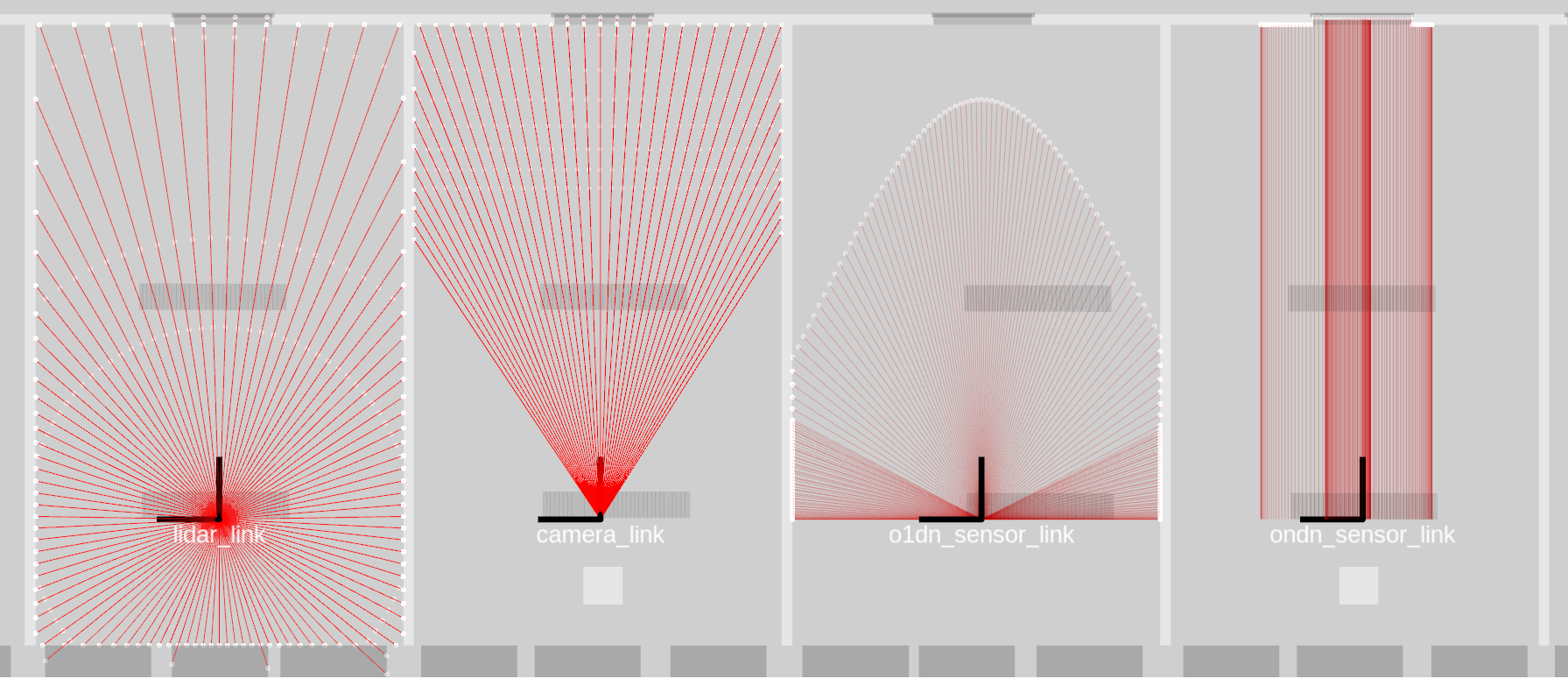
The next instructions show how to initialize each model individually.
Spherical model for LiDARs.
struct SphericalModel
{
DiscreteInterval phi;
DiscreteInterval theta;
Interval range;
};Example:
#include <rmagine/types/sensor_models.h>
namespace rm = rmagine;
// ...
rm::SphericalModel model;
model.theta.min = -M_PI;
model.theta.inc = 0.4 * M_PI / 180.0;
model.theta.size = 900;
model.phi.min = -15.0 * M_PI / 180.0;
model.phi.inc = 2.0 * M_PI / 180.0;
model.phi.size = 16;
model.range.min = 0.0;
model.range.max = 100.0;Pinhole model for depth cameras.
struct PinholeModel
{
uint32_t width;
uint32_t height;
Interval range;
float f[2]; // focal lengths fx, fy
float c[2]; // centroid cx, cy
};Example:
#include <rmagine/types/sensor_models.h>
namespace rm = rmagine;
...
rm::PinholeModel model;
model.width = 200;
model.height = 150;
model.c[0] = 100.0;
model.c[1] = 75.0;
model.f[0] = 100.0;
model.f[1] = 100.0;
model.range.min = 0.0;
model.range.max = 100.0;Fully customizable model with one origin and N directions.
struct O1DnModel
{
uint32_t width;
uint32_t height;
// maximum and minimum allowed range
Interval range;
// i-th ray = orig, dirs[i]
Vector orig; // One origin
Memory<Vector> dirs; // N directions
};Example:
#include <rmagine/types/sensor_models.h>
namespace rm = rmagine;
...
rm::O1DnModel model;
model.orig.x = 0.0;
model.orig.y = 0.0;
model.orig.z = 0.0;
model.width = 200;
model.height = 1;
model.dirs.resize(model.width * model.height);
float step_size = 0.05;
for(int i=0; i<200; i++)
{
float y = - static_cast<float>(i - 100) * step_size;
float x = cos(y) * 2.0 + 2.0;
float z = -1.0;
model.dirs[i].x = x;
model.dirs[i].y = y;
model.dirs[i].z = z;
model.dirs[i].normalize();
}
model.range.min = 0.0;
model.range.max = 100.0;Fully customizable model with N origins and N directions.
struct OnDnModel
{
uint32_t width;
uint32_t height;
Interval range;
// i-th ray = origs[i], dirs[i]
Memory<Vector> origs; // N origins
Memory<Vector> dirs; // N directions
};Example:
#include <rmagine/types/sensor_models.h>
namespace rm = rmagine;
...
rm::OnDnModel model;
model.width = 200;
model.height = 1;
model.dirs.resize(model.width * model.height);
model.origs.resize(model.width * model.height);
float step_size = 0.05;
for(int i=0; i<200; i++)
{
float percent = static_cast<float>(i) / static_cast<float>(200);
float step = - static_cast<float>(i - 100) * step_size;
float y = sin(step);
float x = cos(step);
model.origs[i].x = 0.0;
model.origs[i].y = y * percent;
model.origs[i].z = x * percent;
model.dirs[i].x = 1.0;
model.dirs[i].y = 0.0;
model.dirs[i].z = 0.0;
}
model.range.min = 0.0;
model.range.max = 100.0;Rmagine also provides some example models for testing. These are located in the rmagine/types/sensors.h Header-file and will be expanded in the future to include additional range sensors.
#include <rmagine/types/sensors.h>
namespace rm = rmagine;
...
// Velodyne VLP-16 with different horizontal resoultions
rm::SphericalModel velo_model_1 = rm::vlp16_900();
rm::SphericalModel velo_model_2 = rm::vlp16_360();
// another examples for testing:
rm::SphericalModel ex_lidar = rm::example_spherical();
rm::PinholeModel ex_pinhole = rm::example_pinhole();
rm::O1DnModel ex_o1dn = rm::example_o1dn();
rm::OnDnModel ex_ondn = rm::example_ondn();<< Maps | Home | Simulation >>