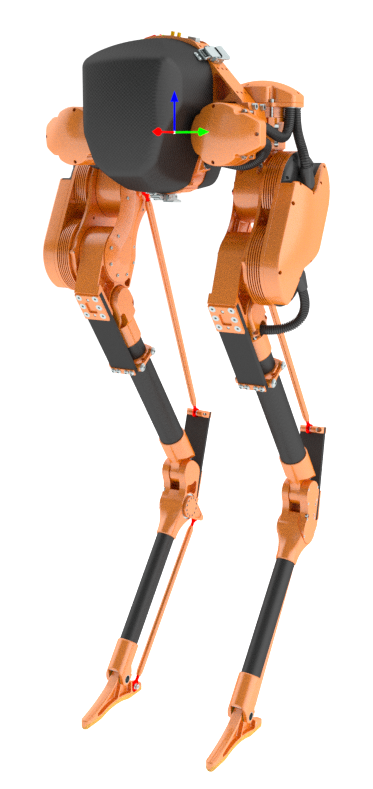
Kinematic Model
--- Pelvis --- Yaw --- Hip --- Thigh --- Knee --- Shin --- Tarsus --- Toe ---
--- Knee Spring --- Heel Spring --- Toe Output Crank --- Plantar Rod --- Achilles Rod ---
--- Abduction/Yaw Motors --- Hip/Knee Motors --- Toe Motor ---
Inertia matrices represent the inertia tensor at the mass-center of a body and aligned with body coordinates.
Since the inertia tensor is symmetric, we use a length-6 vector of its independent components in the form [Ixx Iyy Izz Ixy Ixz Iyz], which is indexed into its matrix form in the order:
Ic = [1 4 5
. 2 6
. . 3]
Center of Mass position is in the form [x y z] in body coordinates.
Position and orientation of each body is relative to the parent's coordinate system.
Robot-forward along the X axis (red). Robot-up along the Z axis (blue). Robot-left along the Y axis (green).
All joints rotate around their local Z axis and obey the right-hand rule for positive rotations.
Toe and Toe Crank are parallel to eachother.
Thigh and tarsus remain 13 degrees from parallel for undeflected springs.
Neutral pose aligns all leg coordinate frames, straightening the leg.
The following pages detail the left leg's links. The right leg has identical orientations, and negates all offsets in the global Y dimension.
Joints are ordered:
- Hip roll
- Hip yaw
- Hip pitch
- Knee motor
- Knee spring
- Ankle
- Toe
Con rods and toe crank are considered massless.
J = [ 1.0000 0 0 0 0 0 0
0 0 -1.0000 -1.0000 -1.0000 -1.0000 -1.0000
0 1.0000 0 0 0 0 0
0 0.0045 1.0411 0.9211 0.8604 0.4256 0.0176
1.1311 0.0796 0 0 0 0 0
-0.0045 0 0.0796 0.0796 0.0322 0.0122 0.0522 ];
T = [ 0.6428 0 -0.7660 0.0306
0 1.0000 0 0.1305
0.7660 0 0.6428 -1.1311
0 0 0 1.0000 ];
M = [ 1.1362 0.0625 -0.0005 -0.0005 -0.0000 0.0001 -0.0000
0.0625 0.0269 -0.0071 0.0034 0.0028 0.0005 0.0000
-0.0005 -0.0071 0.7973 0.6089 0.5305 0.1337 0.0013
-0.0005 0.0034 0.6089 0.5073 0.4462 0.1172 0.0012
-0.0000 0.0028 0.5305 0.4462 0.4037 0.1101 0.0010
0.0001 0.0005 0.1337 0.1172 0.1101 0.0510 0.0006
-0.0000 0.0000 0.0013 0.0012 0.0010 0.0006 0.0004 ];

- Introduction
- Limitation of Liability
- Warning Symbols in this Manual
- General Precautions
- Mechanical Precautions
- Maintenance Precautions
- Research and Development Precautions
- Battery Safety
- Mechanical Overview
- Electrical Overview