This repository has been archived by the owner on Feb 17, 2023. It is now read-only.
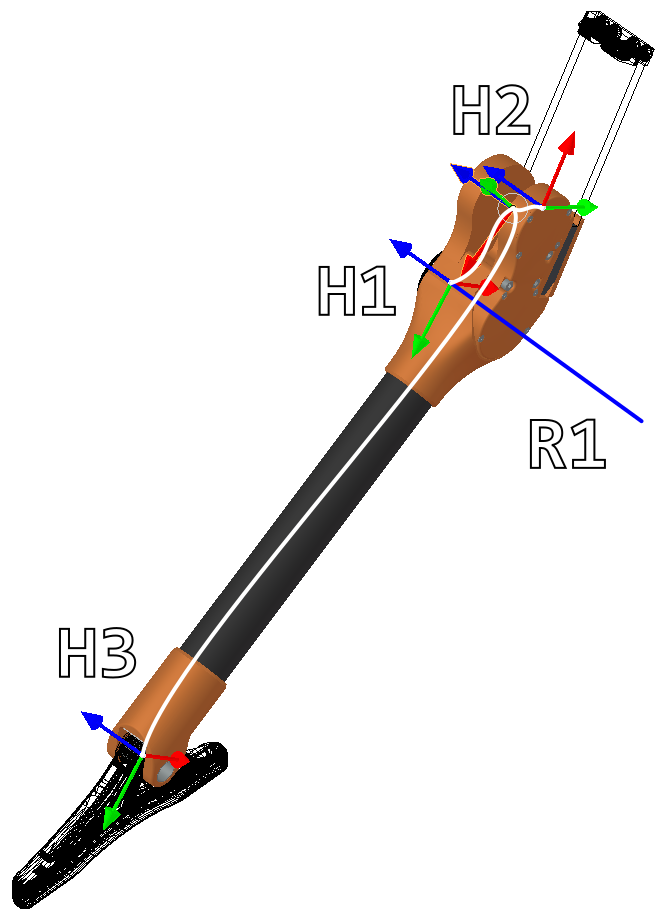
Tarsus Model
--- Pelvis --- Yaw --- Hip --- Thigh --- Knee --- Shin --- Tarsus --- Toe ---
--- Knee Spring --- Heel Spring --- Toe Output Crank --- Plantar Rod --- Achilles Rod ---
--- Abduction/Yaw Motors --- Hip/Knee Motors --- Toe Motor ---
m = 0.782 kg
| 1125 | -2878 | -63 |
J = | -2878 | 23138 | 36 | kg.mm^2
| -63 | 36 | 23947 |
COM = [ 110.5 | -30.6 | -1.3 ] mm
Connects to --> Toe Crank
| 1 | 0 | 0 | 58 |
H1 = | 0 | 1 | 0 | -34 |
| 0 | 0 | 1 | 22.75 |
| 0 | 0 | 0 | 1 |
Connects to --> Heel Spring Base
H2 Euler Angles = [ 155.8 | 0.315 | 4.47 ] deg, ZYX
H2 Offset = [ -12.69 | -30.59 | 0.92 ] mm
k = 2000 N-m/rad
Connects to --> Toe
| 1 | 0 | 0 | 408 |
H3 = | 0 | 1 | 0 | -40 |
| 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 1 |
Tarsus is 13 degrees from parallel to the thigh for an undeflected heel spring. Spring deflection adds to this constant offset.
R1 is driven by Toe Motor.

- Introduction
- Limitation of Liability
- Warning Symbols in this Manual
- General Precautions
- Mechanical Precautions
- Maintenance Precautions
- Research and Development Precautions
- Battery Safety
- Mechanical Overview
- Electrical Overview